


Hacker Ditex Servo Review
 03-07-2017, 11:04 AM
03-07-2017, 11:04 AM
#1

Thread Starter

This was just published in the March K-factor. Added here for those who aren't NSRCA members... This is part 1 of several. I'll be adding more in the April and possibly May K-Factors as I test further aspects of these servos (like speed under load, etc.)
Several months ago I wrote a brief blurb about the new Hacker Ditex servos. At the time availability was very limited, but its easing up considerably and the mid-size 0806 and standard size 1609S servos are readily available from Hacker and F3AUnlimited.
When I originally wrote about them, I may have been a little too understated about these servos. I believe they represent the first true revolution in Servo design since the original proportional radios came out in the late 70�s/early 80�s.
First of all, these servos have no physical stops, it is possible to rotate them through a full 360 degrees of motion. Unlike most servos which use analog potentiometers to determine the position of the output head, the Ditex servos have a high resolution indexed hall encoder built into them, similar to servo motors that drive a laser cutting head or CNC mills (though those typically use optical encoders). In this way, the servo is always aware of the exact position of its head. Here�s what this means: for the first time, you can adjust the neutral position of your servo to get a precise 90-degree angle to your control horns without affecting travel in either direction! With mechanically limited servos and potentiometers, whether you programmed the servo itself to adjust the neutral or used subtrim in your radio, you limited travel in one direction and expanded potential travel in the other direction. That doesn�t happen with the Ditex! Hook it up to the programmer, disengage the head via the programmer, rotate the head to your desired neutral position, click �Set neutral� and �Engage� on the programmer and you�ve got a neutral position established. You now have the full desired (default is 60 degrees) amount of travel clockwise and counter-clockwise on the servo as your radio commands.
Further, I can set my desired servo endpoints via the servo programming from the PC (or, soon, from a Jeti radio) to expand or restrict the range of motion to any angle departure from neutral. The default is 60 degrees, but if I don�t need that much for a given installation to get the full desired control surface travel I can restrict it to say, 45 degrees deflection from neutral. Now, that may not sound revolutionary, but it is! Most servos, even programmable ones, impose more constrained end points by simply ignoring pulses that would take them out of the set end points (i.e. if I constrain to 45 degrees each way instead of 60 degrees I�m ignoring the top and bottom 125 microseconds of pulse and responding only to pulses from 1125 microseconds to 1875 microseconds). The Ditex servos, instead, continue to use the full pulse width for the new range of travel and divide that range up appropriately, therefore if I set more restrictive endpoints I get higher resolution of servo position, if I set a wider set of endpoints (say 90 degrees to 90 degrees) I reduce my servo resolution. In addition, these servos can run on any voltage from 6v through 10v!
Quite frankly, all the innovation here scared me a bit. So I wanted a way to truly measure the performance of these servos. So I did some research and worked with my buddy with a full machine shop in his garage to build a servo test jig that would be repeatable. The result is shown here:
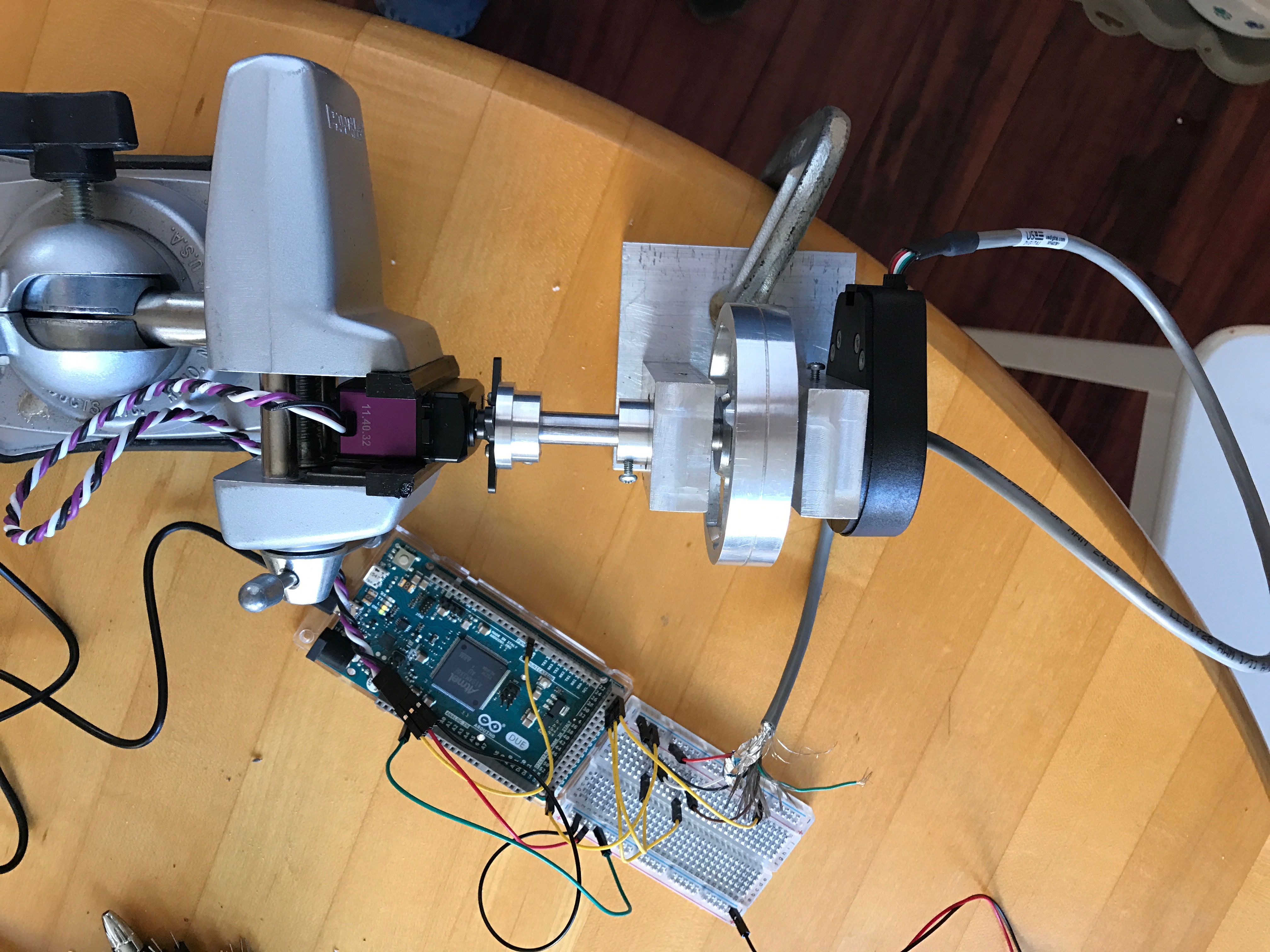
Starting from the left side of the photograph, you see a high resolution optical encoder from US Digital, it�s a quadrature encoder that tracks 7200 counts per revolution (28,000 pulses per revolution) for a 0.05-degree accuracy if I simply use the count. In theory, I could get 4x higher resolution if I instead track pulses but 0.05 degrees is more than enough accuracy for my purposes at the moment. If we apply our understanding of significant figures, it means that I can report numbers to 0.1-degree accuracy. The encoder is mounted to a 6mm shaft which is bearing supported through two aluminum pillars mounted to a base which can be clamped to the test bench (in the picture above, �test bench� == kitchen table J). The pillars and shaft support a 3� diameter wheel with a groove to guide a pull-pull cable to which I can attach any amount of weight desired to apply a measured torque load (each ounce of weight on the pull-pull cable imposes 1.5 oz-in of torque). You�ll notice one side of the wheel deliberately extends past the aluminum base to make it easy to apply the load with no interference. Finally, on the other end of the shaft we have the shaft flattened a bit and an aluminum end cap that secures to the shaft via a set screw and has holes drilled and tapped to center mount any servo horn.
Mate the servo under test to the horn and lock it into place � I played with many potential means of holding the servo securely before realizing that my Panavise was literally perfect for the job. Makes positioning the servo and locking it down quite easy.
Finally, moving toward the bottom of the picture you see the electronic data collection setup. I�m running an Arduino Due with an 84MHz processor which, with the use of the Arduino fastDigitalRead routines, can keep up with the 192KHz interrupt rate imposed by the encoder pulses coming from a servo with 0.05s/60 degrees speed without dropping any pulses � this is critical to the accuracy of the setup. The encoder has 5 wires, the green one is the index wire, but I don�t need the index pulse, so I skip that one. Two wires for +5v and ground, one for the A pulse and one for the B pulse of the quadrature (so we can tell from the pulse positions whether we are rotating clockwise or counterclockwise). The bottom side of the breadboard is used for a separate power bus to supply power > 5v to the servo without frying the encoder or the Arduino. The servo is driven by the Arduino as well, keeping variances in receivers and radios out of the test loop, so the signal line for the servo comes from one of the Arduino�s analog ports.
My first goal was to measure the centering accuracy of the servos, and, to have a control/baseline of comparison, I also tested some JR Servos I had available: the venerable JR DS390HV which has been very popular in the pattern world for mounting in the horizontal stab, the JR NX3425 which JR advertises as the natural successor to some of the JR WV servos I loved, and the JR DS8411 which has often been used for rudder control. I wrote a relatively simple Arduino sketch to center the servo and initialize the encoder count, then run 20 iterations of a simple test: hold at center (1500 microseconds) and measure the count, deflect all the way in one direction, hold for 1 second, return to center, hold for 2 seconds, measure the count difference from the encoder, deflect all the way in the other direction, hold for 1 second, return to center and hold again, measuring the deflection from the original center count. For each test, I report the average of the two center count differences from the starting center and across ALL tests I run a cumulative difference from the originally measured center.
For the JR servos, the results were as follows:
The JR DS390HV put in a very impressive performance, with a maximum drift from starting center of 10 counts (.5 degrees) and a cumulative difference across all 20 tests of 5.4 counts = 0.27 degrees!
The JR NX3425 did worse with a maximum difference of over 40 counts (2 degrees!) and a cumulative difference of 30.5 counts, 1.5 degrees.
The JR DS8411, unsurprisingly, did MUCH worse, with an average difference from center across all tests of 110 counts (5.5 degrees average) and a cumulative difference of 90.8 counts, 4.5 degrees.
Now, granted, by the time these differences reach the control surface in question, the difference should be much smaller, because typically we use a short servo horn and a longer control horn. If the length ratio between servo horn and control horn is 1:2 the servos drift from center is halved when measured at the control surface (meaning the DS390HV would cause at most a 0.25-degree deflection of the elevator). If the ratio is 1:3, the drift is cut by 1/3, etc.
So how did the Ditex servos perform? I was, blown away!
For the TD1609S (standard size servo with 229 oz.-in of torque at 8.4v) the max drift was 6 counts (0.3 degrees) and the cumulative drift was less than 1 count, 0.02 degrees! This means that after 20 tests the center point was not measurably different from the original center! I should mention that I had the servo set to �competition� mode, for a dead band of 0.19 and a slowing of the motor as the servo approaches the target position for best accuracy.
For the TD0806MD servo (mid-size servo with 106 oz.-in of torque and 0.05s 60 degree travel) which should work nicely (at 8.4v) for ailerons and elevator (though I�m more likely to go with the mini size TD0606M servo with 82oz-in of torque for elevator to save 1.22 oz. in the tail), I ran into a limitation which Hacker assures me will be resolved soon that the programmer did not allow me to take it into competition mode I got a still very impressive result: Maximum drift from center of 4 counts (0.2 degrees) and cumulative drift of (3.5 counts, 0.175 degrees)!
Jumping up to the big servo, the 2612P (Standard size, 368 oz-in of torque at 8.4v, which is, quite frankly, overkill for our rudders (I�d be more likely to use the TD1609S)), again set to competition mode. The results degraded a bit the max difference from center was 5.5 counts (0.27 degrees) with the cumulative difference coming out at 11 counts (0.55 degrees).
Testing under load I ran into some issues with my �test bench� (AKA kitchen table) in that jerking 36 ounces of weight for 54 oz-in of applied torque a few inches in 0.05 to 0.12s was causing quite a bit of vibration in the table, which, in turn, induced measuring errors in the high-resolution encoder. So, under-load test results must wait until I clear my garage bench and can run further tests.
In summary, these servos are amazing on paper, I�ve never seen servos that compare simply from a torque per gram of weight perspective, when you layer in their revolutionary electronics and programmability, in-air telemetry to warn you if you are running into stall situations in flight, they are stunning. But we�ve all seen servo stats that look amazing only to be disappointed with real-world performance when installed in an airplane. From the results of this centering test, I can say with high confidence that you won�t be disappointed with the Hacker servo in your pattern ship!
I�m personally looking forward to the availability of the 0606M servo to allow me to build out my second Allure. By my calculations, using the 0606M on the stab, 0806MD on the ailerons, and 1609S on the rudder, I should save 38 grams over my first allure (JR MPH83T, MP91S, and MP30S servos on rudder, aileron, stabs, respectively).
Several months ago I wrote a brief blurb about the new Hacker Ditex servos. At the time availability was very limited, but its easing up considerably and the mid-size 0806 and standard size 1609S servos are readily available from Hacker and F3AUnlimited.
When I originally wrote about them, I may have been a little too understated about these servos. I believe they represent the first true revolution in Servo design since the original proportional radios came out in the late 70�s/early 80�s.
First of all, these servos have no physical stops, it is possible to rotate them through a full 360 degrees of motion. Unlike most servos which use analog potentiometers to determine the position of the output head, the Ditex servos have a high resolution indexed hall encoder built into them, similar to servo motors that drive a laser cutting head or CNC mills (though those typically use optical encoders). In this way, the servo is always aware of the exact position of its head. Here�s what this means: for the first time, you can adjust the neutral position of your servo to get a precise 90-degree angle to your control horns without affecting travel in either direction! With mechanically limited servos and potentiometers, whether you programmed the servo itself to adjust the neutral or used subtrim in your radio, you limited travel in one direction and expanded potential travel in the other direction. That doesn�t happen with the Ditex! Hook it up to the programmer, disengage the head via the programmer, rotate the head to your desired neutral position, click �Set neutral� and �Engage� on the programmer and you�ve got a neutral position established. You now have the full desired (default is 60 degrees) amount of travel clockwise and counter-clockwise on the servo as your radio commands.
Further, I can set my desired servo endpoints via the servo programming from the PC (or, soon, from a Jeti radio) to expand or restrict the range of motion to any angle departure from neutral. The default is 60 degrees, but if I don�t need that much for a given installation to get the full desired control surface travel I can restrict it to say, 45 degrees deflection from neutral. Now, that may not sound revolutionary, but it is! Most servos, even programmable ones, impose more constrained end points by simply ignoring pulses that would take them out of the set end points (i.e. if I constrain to 45 degrees each way instead of 60 degrees I�m ignoring the top and bottom 125 microseconds of pulse and responding only to pulses from 1125 microseconds to 1875 microseconds). The Ditex servos, instead, continue to use the full pulse width for the new range of travel and divide that range up appropriately, therefore if I set more restrictive endpoints I get higher resolution of servo position, if I set a wider set of endpoints (say 90 degrees to 90 degrees) I reduce my servo resolution. In addition, these servos can run on any voltage from 6v through 10v!
Quite frankly, all the innovation here scared me a bit. So I wanted a way to truly measure the performance of these servos. So I did some research and worked with my buddy with a full machine shop in his garage to build a servo test jig that would be repeatable. The result is shown here:
Starting from the left side of the photograph, you see a high resolution optical encoder from US Digital, it�s a quadrature encoder that tracks 7200 counts per revolution (28,000 pulses per revolution) for a 0.05-degree accuracy if I simply use the count. In theory, I could get 4x higher resolution if I instead track pulses but 0.05 degrees is more than enough accuracy for my purposes at the moment. If we apply our understanding of significant figures, it means that I can report numbers to 0.1-degree accuracy. The encoder is mounted to a 6mm shaft which is bearing supported through two aluminum pillars mounted to a base which can be clamped to the test bench (in the picture above, �test bench� == kitchen table J). The pillars and shaft support a 3� diameter wheel with a groove to guide a pull-pull cable to which I can attach any amount of weight desired to apply a measured torque load (each ounce of weight on the pull-pull cable imposes 1.5 oz-in of torque). You�ll notice one side of the wheel deliberately extends past the aluminum base to make it easy to apply the load with no interference. Finally, on the other end of the shaft we have the shaft flattened a bit and an aluminum end cap that secures to the shaft via a set screw and has holes drilled and tapped to center mount any servo horn.
Mate the servo under test to the horn and lock it into place � I played with many potential means of holding the servo securely before realizing that my Panavise was literally perfect for the job. Makes positioning the servo and locking it down quite easy.
Finally, moving toward the bottom of the picture you see the electronic data collection setup. I�m running an Arduino Due with an 84MHz processor which, with the use of the Arduino fastDigitalRead routines, can keep up with the 192KHz interrupt rate imposed by the encoder pulses coming from a servo with 0.05s/60 degrees speed without dropping any pulses � this is critical to the accuracy of the setup. The encoder has 5 wires, the green one is the index wire, but I don�t need the index pulse, so I skip that one. Two wires for +5v and ground, one for the A pulse and one for the B pulse of the quadrature (so we can tell from the pulse positions whether we are rotating clockwise or counterclockwise). The bottom side of the breadboard is used for a separate power bus to supply power > 5v to the servo without frying the encoder or the Arduino. The servo is driven by the Arduino as well, keeping variances in receivers and radios out of the test loop, so the signal line for the servo comes from one of the Arduino�s analog ports.
My first goal was to measure the centering accuracy of the servos, and, to have a control/baseline of comparison, I also tested some JR Servos I had available: the venerable JR DS390HV which has been very popular in the pattern world for mounting in the horizontal stab, the JR NX3425 which JR advertises as the natural successor to some of the JR WV servos I loved, and the JR DS8411 which has often been used for rudder control. I wrote a relatively simple Arduino sketch to center the servo and initialize the encoder count, then run 20 iterations of a simple test: hold at center (1500 microseconds) and measure the count, deflect all the way in one direction, hold for 1 second, return to center, hold for 2 seconds, measure the count difference from the encoder, deflect all the way in the other direction, hold for 1 second, return to center and hold again, measuring the deflection from the original center count. For each test, I report the average of the two center count differences from the starting center and across ALL tests I run a cumulative difference from the originally measured center.
For the JR servos, the results were as follows:
The JR DS390HV put in a very impressive performance, with a maximum drift from starting center of 10 counts (.5 degrees) and a cumulative difference across all 20 tests of 5.4 counts = 0.27 degrees!
The JR NX3425 did worse with a maximum difference of over 40 counts (2 degrees!) and a cumulative difference of 30.5 counts, 1.5 degrees.
The JR DS8411, unsurprisingly, did MUCH worse, with an average difference from center across all tests of 110 counts (5.5 degrees average) and a cumulative difference of 90.8 counts, 4.5 degrees.
Now, granted, by the time these differences reach the control surface in question, the difference should be much smaller, because typically we use a short servo horn and a longer control horn. If the length ratio between servo horn and control horn is 1:2 the servos drift from center is halved when measured at the control surface (meaning the DS390HV would cause at most a 0.25-degree deflection of the elevator). If the ratio is 1:3, the drift is cut by 1/3, etc.
So how did the Ditex servos perform? I was, blown away!
For the TD1609S (standard size servo with 229 oz.-in of torque at 8.4v) the max drift was 6 counts (0.3 degrees) and the cumulative drift was less than 1 count, 0.02 degrees! This means that after 20 tests the center point was not measurably different from the original center! I should mention that I had the servo set to �competition� mode, for a dead band of 0.19 and a slowing of the motor as the servo approaches the target position for best accuracy.
For the TD0806MD servo (mid-size servo with 106 oz.-in of torque and 0.05s 60 degree travel) which should work nicely (at 8.4v) for ailerons and elevator (though I�m more likely to go with the mini size TD0606M servo with 82oz-in of torque for elevator to save 1.22 oz. in the tail), I ran into a limitation which Hacker assures me will be resolved soon that the programmer did not allow me to take it into competition mode I got a still very impressive result: Maximum drift from center of 4 counts (0.2 degrees) and cumulative drift of (3.5 counts, 0.175 degrees)!
Jumping up to the big servo, the 2612P (Standard size, 368 oz-in of torque at 8.4v, which is, quite frankly, overkill for our rudders (I�d be more likely to use the TD1609S)), again set to competition mode. The results degraded a bit the max difference from center was 5.5 counts (0.27 degrees) with the cumulative difference coming out at 11 counts (0.55 degrees).
Testing under load I ran into some issues with my �test bench� (AKA kitchen table) in that jerking 36 ounces of weight for 54 oz-in of applied torque a few inches in 0.05 to 0.12s was causing quite a bit of vibration in the table, which, in turn, induced measuring errors in the high-resolution encoder. So, under-load test results must wait until I clear my garage bench and can run further tests.
In summary, these servos are amazing on paper, I�ve never seen servos that compare simply from a torque per gram of weight perspective, when you layer in their revolutionary electronics and programmability, in-air telemetry to warn you if you are running into stall situations in flight, they are stunning. But we�ve all seen servo stats that look amazing only to be disappointed with real-world performance when installed in an airplane. From the results of this centering test, I can say with high confidence that you won�t be disappointed with the Hacker servo in your pattern ship!
I�m personally looking forward to the availability of the 0606M servo to allow me to build out my second Allure. By my calculations, using the 0606M on the stab, 0806MD on the ailerons, and 1609S on the rudder, I should save 38 grams over my first allure (JR MPH83T, MP91S, and MP30S servos on rudder, aileron, stabs, respectively).
 03-09-2017, 02:19 PM
03-09-2017, 02:19 PM
#3
My Feedback: (46)
Join Date: Sep 2003
Location: Bridgewater,
NJ
Posts: 948
Likes: 0
Received 0 Likes
on
0 Posts
Pete or any one else, have you taken a look at the Xpert servos. There are a few that might meet our needs and are light in weight. I know John Tarpinian has a few he is going to try.
http://xpert-rc.com/product-list/
I think these were the ones he said might meet our needs.
MI-3301-HV
CM-2401-HV
PM-3402
http://xpert-rc.com/product-list/
I think these were the ones he said might meet our needs.
MI-3301-HV
CM-2401-HV
PM-3402
04-12-2017, 02:03 AM
#5

Join Date: May 2003
Location: Ramat Hashrone, ISRAEL
Posts: 1,201
Likes: 0
Received 36 Likes
on
32 Posts
Can someone knows if the Ditex servos works with the Futaba S.BUS?
I am going to build a biplane and I would like to have only one wire to each wing.
Another question,
I know that people are using the Futaba BLS173SVi S.Bus2 Brushless Mini Air HV Servo for biplane ailerons;
I would like to hear opinions about using the Hacker Ditex TD0606M servos for the biplane ailerons, are they strong enough? So I can save 20 gram (28-23)X4.
Here are these servos data:
Futaba BLS173SVi S.Bus2 Brushless Mini Air HV Servo
Weight (g): 28
Speed (@7.4V sec/60):0.1
Torque (@7.4V kg/cm): 7.63
Hacker Ditex TD0606M servo
Weight (g): 23
Speed (@7.4V sec/60):0.067
Torque (@7.4V kg/cm): 5.85
I am going to build a biplane and I would like to have only one wire to each wing.
Another question,
I know that people are using the Futaba BLS173SVi S.Bus2 Brushless Mini Air HV Servo for biplane ailerons;
I would like to hear opinions about using the Hacker Ditex TD0606M servos for the biplane ailerons, are they strong enough? So I can save 20 gram (28-23)X4.
Here are these servos data:
Futaba BLS173SVi S.Bus2 Brushless Mini Air HV Servo
Weight (g): 28
Speed (@7.4V sec/60):0.1
Torque (@7.4V kg/cm): 7.63
Hacker Ditex TD0606M servo
Weight (g): 23
Speed (@7.4V sec/60):0.067
Torque (@7.4V kg/cm): 5.85
04-12-2017, 12:19 PM
#6
Thread Starter
Can someone knows if the Ditex servos works with the Futaba S.BUS?
I am going to build a biplane and I would like to have only one wire to each wing.
Another question,
I know that people are using the Futaba BLS173SVi S.Bus2 Brushless Mini Air HV Servo for biplane ailerons;
I would like to hear opinions about using the Hacker Ditex TD0606M servos for the biplane ailerons, are they strong enough? So I can save 20 gram (28-23)X4.
Here are these servos data:
Futaba BLS173SVi S.Bus2 Brushless Mini Air HV Servo
Weight (g): 28
Speed (@7.4V sec/60):0.1
Torque (@7.4V kg/cm): 7.63
Hacker Ditex TD0606M servo
Weight (g): 23
Speed (@7.4V sec/60):0.067
Torque (@7.4V kg/cm): 5.85
I am going to build a biplane and I would like to have only one wire to each wing.
Another question,
I know that people are using the Futaba BLS173SVi S.Bus2 Brushless Mini Air HV Servo for biplane ailerons;
I would like to hear opinions about using the Hacker Ditex TD0606M servos for the biplane ailerons, are they strong enough? So I can save 20 gram (28-23)X4.
Here are these servos data:
Futaba BLS173SVi S.Bus2 Brushless Mini Air HV Servo
Weight (g): 28
Speed (@7.4V sec/60):0.1
Torque (@7.4V kg/cm): 7.63
Hacker Ditex TD0606M servo
Weight (g): 23
Speed (@7.4V sec/60):0.067
Torque (@7.4V kg/cm): 5.85
The operative factors in the torque required for a given control surface are speed of the aircraft and size (chord and length) of the control surface, and deflection of the control surface (in degrees) relative to deflection of the servo (in degrees). I did the calculations for an elevator on an Allure and the 0606 should be just enough for that at 8.4v. Even if the ailerons have a smaller chord than a typical monoplane aileron, I would NOT use an 0606 on ailerons. The 0806 should handle the ailerons quite nicely however.
Peter+
04-12-2017, 03:21 PM
#7

I've used this torque calculator with success. Please note what happens when you reduce servo travel. Also the calculator assumes zero force needed to move the surface. So if you have stiff hinges or linkage, take that into account. I was surprised to find that required torque is not as high as some claim we need. Play around with the numbers to get an idea how it all falls together.
Ken
Ken
04-12-2017, 03:33 PM
#8
Thread Starter
Ken, I assume you mean this one?
http://www.mnbigbirds.com/Servo%20To...0Caculator.htm
I've used it too. Agreed on the surprisingly low numbers, but Torque for an aileron is still well above the 82 oz-in MAX that the 0606 puts out.
Peter+
http://www.mnbigbirds.com/Servo%20To...0Caculator.htm
I've used it too. Agreed on the surprisingly low numbers, but Torque for an aileron is still well above the 82 oz-in MAX that the 0606 puts out.
Peter+
 04-12-2017, 10:00 PM
04-12-2017, 10:00 PM
#10
Join Date: May 2003
Location: Ramat Hashrone, ISRAEL
Posts: 1,201
Likes: 0
Received 36 Likes
on
32 Posts
Ken, I assume you mean this one?
http://www.mnbigbirds.com/Servo%20To...0Caculator.htm
I've used it too. Agreed on the surprisingly low numbers, but Torque for an aileron is still well above the 82 oz-in MAX that the 0606 puts out.
Peter+
http://www.mnbigbirds.com/Servo%20To...0Caculator.htm
I've used it too. Agreed on the surprisingly low numbers, but Torque for an aileron is still well above the 82 oz-in MAX that the 0606 puts out.
Peter+
What about the S.BUS technology do the Hacker Ditex servos have this function?
04-13-2017, 08:16 AM
#11
Thread Starter
Hi Isaac, I don't think so. But I've always been suspicious of anything that is combining the load of multiple servos on a single power line that is only rated for 5A, especially for long runs like the tail.
You could always use the little Futaba box that splits the SBus signal out to the servos appropriately...
Peter+
You could always use the little Futaba box that splits the SBus signal out to the servos appropriately...
Peter+
04-13-2017, 03:10 PM
#12
Ken, I assume you mean this one?
http://www.mnbigbirds.com/Servo%20To...0Caculator.htm
I've used it too. Agreed on the surprisingly low numbers, but Torque for an aileron is still well above the 82 oz-in MAX that the 0606 puts out.
Peter+
http://www.mnbigbirds.com/Servo%20To...0Caculator.htm
I've used it too. Agreed on the surprisingly low numbers, but Torque for an aileron is still well above the 82 oz-in MAX that the 0606 puts out.
Peter+
Ken
06-02-2017, 06:52 AM
#13

got 4 pieces of them 3 are easy to program the forth gives me a issue.
if i rotate servo by hand lets say left goes to 49 degrees then to the right it goes to about 40 degrees then jumps to 410 degrees and stops there with a noise and cant turn in further (in engaged mode usb)
any idea? because i am running out of them.
if i rotate servo by hand lets say left goes to 49 degrees then to the right it goes to about 40 degrees then jumps to 410 degrees and stops there with a noise and cant turn in further (in engaged mode usb)
any idea? because i am running out of them.
06-04-2017, 03:31 AM
#14

Hi Isaac,
The operative factors in the torque required for a given control surface are speed of the aircraft and size (chord and length) of the control surface, and deflection of the control surface (in degrees) relative to deflection of the servo (in degrees). I did the calculations for an elevator on an Allure and the 0606 should be just enough for that at 8.4v. Even if the ailerons have a smaller chord than a typical monoplane aileron, I would NOT use an 0606 on ailerons. The 0806 should handle the ailerons quite nicely however.
Peter+
The operative factors in the torque required for a given control surface are speed of the aircraft and size (chord and length) of the control surface, and deflection of the control surface (in degrees) relative to deflection of the servo (in degrees). I did the calculations for an elevator on an Allure and the 0606 should be just enough for that at 8.4v. Even if the ailerons have a smaller chord than a typical monoplane aileron, I would NOT use an 0606 on ailerons. The 0806 should handle the ailerons quite nicely however.
Peter+
I'm currently using the JR MP31TWV on my Xareltoo ailerons and elevators, which work fine. Now that these are no longer available, I've been looking at other options and the 0606 is one that I thought would be OK.
I'm using the JR DS9411 on my Valiant ailerons which are 82 oz- in and these work fine as well. Although a bit heavier, the 0608 might be a better choice for mono ailerons, even though I think the 0606 would do the job.
I tried using the calculator mentioned above, but came up with 1 oz - in
") I entered all the required numbers, so don't know what is wrong there.
I entered all the required numbers, so don't know what is wrong there.I agree with rm regarding torque.
Last edited by drac1; 06-04-2017 at 03:44 AM.
06-04-2017, 06:06 AM
#15

Join Date: Mar 2006
Location: Houston,
TX
Posts: 325
Likes: 0
Received 0 Likes
on
0 Posts
I think the 0606 should be fine for bipe ailerons, they have more torque than an old futaba 9650 which was the standard aileron servo for bipes before the bls and HV servos came along.
06-05-2017, 09:47 AM
#16
Has anyone run any tests to determine if there are any shifts in neutrals or end points due to temperature? I'm assuming these servos have some type of position sensor like a Hall Effect device that probably has some thermal drift.
Jim O
Jim O
06-06-2017, 09:24 AM
#18
12-25-2018, 04:45 AM
#19
Junior Member
Join Date: Dec 2018
Posts: 2
Likes: 0
Received 0 Likes
on
0 Posts
I have 4 0606 servos that I have installed in a new electric build with a 50" span. These are the first of this type that I have tried with big expectations from write ups like the one that started this thread. After finishing the installation and programming the servos for center and throw I was very disappointed to find that I had enough backlash apparently in the gear train that I am pretty sure it would setup plane destroying flutter! Have I done something wrong in the programming? The MKS servos I usually use are totally tight by comparison.
05-14-2019, 08:02 AM
#20

I am building up a parts list for my new Alchemy, do you guys think the 0606M for Elevators, 0806MD for Ailerons and 1609S for Rudder are still the best sizes?
Thanks.
Thanks.
05-14-2019, 01:55 PM
#21
Thread Starter
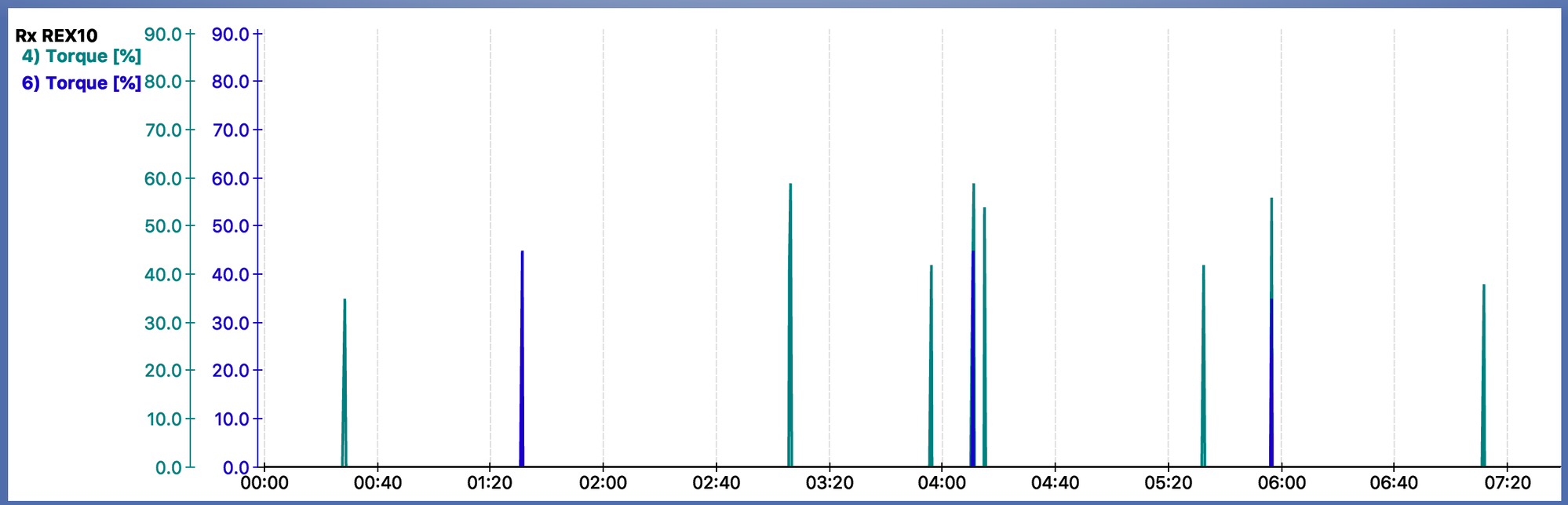
Based on my telemetry data, if you are doing any extended knife-edge stuff, I would recommend bumping the rudder servo up to one with more torque. 0606 is doing fine in elevator and 0806 is more than adequate for ailerons. I've been meaning to have a pilot better than myself fly my plane through more difficult maneuvers and then review the telemetry data...
Peter+
Peter+
05-14-2019, 02:06 PM
#22
Based on my telemetry data, if you are doing any extended knife-edge stuff, I would recommend bumping the rudder servo up to one with more torque. 0606 is doing fine in elevator and 0806 is more than adequate for ailerons. I've been meaning to have a pilot better than myself fly my plane through more difficult maneuvers and then review the telemetry data...
Peter+
Peter+
05-14-2019, 02:12 PM
#23
Thread Starter
kg isn't a measure of torque. Ncm or oz-in are the common torque measurements (you could do kg-cm or g-cm as well). Which servo are you referring to Drac1?
The 1609 hits 70-80% of available torque holding my Allure through a 2-of-4 point entry Split-S. That tells me it's too small for more advanced KE flight.
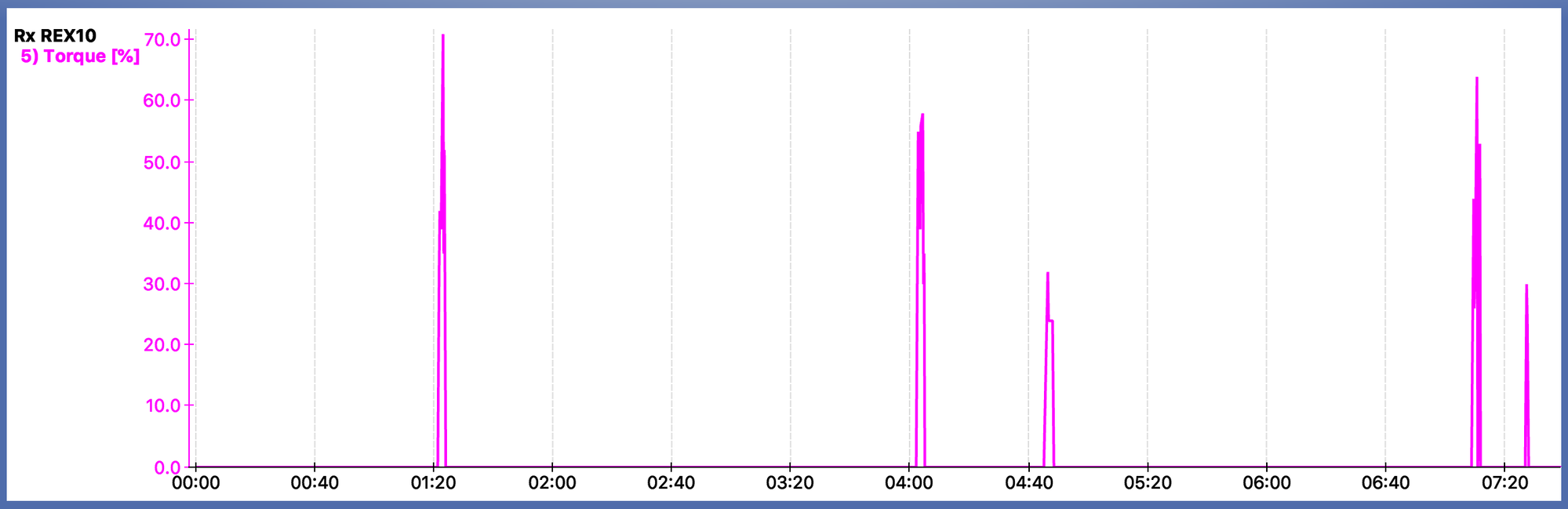
The 1609 hits 70-80% of available torque holding my Allure through a 2-of-4 point entry Split-S. That tells me it's too small for more advanced KE flight.
 05-14-2019, 02:21 PM
05-14-2019, 02:21 PM
#25
Thread Starter
Oh! And that's at 8.0v regulated voltage to the servos. I just bumped to normal 8.3v using the Mezon Pro ESC's BEC but haven't looked closely at the telemetry there yet from the last 2 contests.
Peter+
Peter+