


Bavarian Demon Cortex PRO is here!!

 06-05-2018, 08:15 PM
06-05-2018, 08:15 PM
#527

My Feedback: (61)
Join Date: Sep 2002
Location: spring,
TX
Posts: 494
Likes: 0
Received 0 Likes
on
0 Posts
Question for the pros...
I am using a Jeti setup with the CP and a CB200. All is working great.
I have nose gear steering on a separate channel which is ch. 15. it is mixed from the rudder stick input only when gear is down.
Is there a way to get this channel (15) to be corrected by the gyro 'rudder' axis?
Possibly have the gear down when teaching the inputs, so the CP sees an input on channel 15 when the rudder stick is moved during teach?
What if the gyro correction is correct on the rudder but backwards on the nose steer?
Thanks in advance for the help.
I am using a Jeti setup with the CP and a CB200. All is working great.
I have nose gear steering on a separate channel which is ch. 15. it is mixed from the rudder stick input only when gear is down.
Is there a way to get this channel (15) to be corrected by the gyro 'rudder' axis?
Possibly have the gear down when teaching the inputs, so the CP sees an input on channel 15 when the rudder stick is moved during teach?
What if the gyro correction is correct on the rudder but backwards on the nose steer?
Thanks in advance for the help.
 06-23-2018, 11:05 PM
06-23-2018, 11:05 PM
#531
I have cortex pro Jeti CB 200. R2 sat. The R2 sat is connect to the Cortex Pro. And the Cortex to CB 200. My problem is that i can not see the Cortex Pro and CB 200 at the same time in my DS16 under Device explorer. Is it possible to see both at the same time?
06-24-2018, 10:03 AM
#534

we are at 4.28 anyway
first step : update the firmware from the DS-16 to 4.28 anyway.
2 . upgrade your CB box and sats also if not allready done.
3 upgrade the BD to the latest firmware.
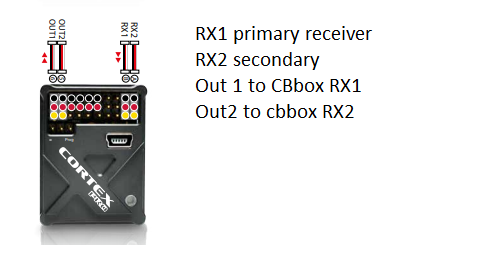
then bind both receivers to the cb200 make sure you MARK Primary receiver. (dual path)
Set both to EX serial in the Rex setup
replug cables to the EX port of the Rsat,s
then follow the picture here shown.
turn on installation , plug the Jumper to the BD "find" the correct signal , followed by a slow blue.\
remove the Plug and should show up in the device explorer.
should nicely how up on the device expolorer.
Last edited by digitech; 06-24-2018 at 10:05 AM.
06-24-2018, 12:11 PM
#535
we are at 4.28 anyway
first step : update the firmware from the DS-16 to 4.28 anyway.
2 . upgrade your CB box and sats also if not allready done.
3 upgrade the BD to the latest firmware.
then bind both receivers to the cb200 make sure you MARK Primary receiver. (dual path)
Set both to EX serial in the Rex setup
replug cables to the EX port of the Rsat,s
then follow the picture here shown.
turn on installation , plug the Jumper to the BD "find" the correct signal , followed by a slow blue.\
remove the Plug and should show up in the device explorer.
should nicely how up on the device expolorer.
06-24-2018, 07:13 PM
#536
Thread Starter
guys if you are not seeing the Cortex.. and you are running Rex receivers, you might have to upgrade them to v1.1 before the CP will show up, especially if you have TX 4.28...
As a side note if you have 4.27, then update to 4.28 immediately..
As a side note if you have 4.27, then update to 4.28 immediately..
06-25-2018, 04:45 PM
#537

Hi fellows, I'm a happy JETI user (not a Futaba user) but right now I'm building a new jet for a good friend, with Futaba TX/RX, Powerbox SRS, Bavarian Cortex Pro.
My problem is that I can not solve how to assign a 3 pos sw to activate the gyro in a F-18MZ.
I have tried several modes, screens, switches .... but nothing turns out.
Could someone please explain me how to do it with "apples and oranges"
Many thanks
Regards
My problem is that I can not solve how to assign a 3 pos sw to activate the gyro in a F-18MZ.
I have tried several modes, screens, switches .... but nothing turns out.
Could someone please explain me how to do it with "apples and oranges"
Many thanks
Regards


 07-11-2018, 12:11 PM
07-11-2018, 12:11 PM
#540
Have a question for the pro and my Jeti setup. Okay so I know we need to connect an additional line from the CP to CB200 which I have. Now in the TX do you still assign the function to a port for gain like you would do on the standard Cortex with the gray wire? I will be running the CP with both RX connected to CP and the to the CB. hope this make sense.
07-11-2018, 11:53 PM
#541
Have a question for the pro and my Jeti setup. Okay so I know we need to connect an additional line from the CP to CB200 which I have. Now in the TX do you still assign the function to a port for gain like you would do on the standard Cortex with the gray wire? I will be running the CP with both RX connected to CP and the to the CB. hope this make sense.
when you learned the gyro in you are asked to flip a switch , for the gyro stabilize/headinglock/off.
this switch can then be also set as a gain.
07-12-2018, 03:01 AM
#542
Have a question for the pro and my Jeti setup. Okay so I know we need to connect an additional line from the CP to CB200 which I have. Now in the TX do you still assign the function to a port for gain like you would do on the standard Cortex with the gray wire? I will be running the CP with both RX connected to CP and the to the CB. hope this make sense.
07-12-2018, 10:38 AM
#543
okay so when running the RXs from the CP to the CB, channel 4 on the cortex the extra cable we carry over to the CB200 acts like the gray wire that is on the cable loom? Just trying to make sure I understand. I have the TX already setup with gyro function set and set on port 13 on the CB200.
07-12-2018, 11:40 AM
#544

okay so when running the RXs from the CP to the CB, channel 4 on the cortex the extra cable we carry over to the CB200 acts like the gray wire that is on the cable loom? Just trying to make sure I understand. I have the TX already setup with gyro function set and set on port 13 on the CB200.
FYI, on the "gyro" channel, it's not even necessary to use the "gyro" function. Just use "servo" travel values for the amount of sensitivity you want. 0 (zero) value is gyro "off", negative values are "normal" mode with -100% being max sensitivity and positive values up to +100% are for heading hold. I initially set mine up on a rotary switch with the center position as zero. Slowly dial in gain sensitivity during flight until you find a value you like (i.e. no oscillation at high speed). I then assign the gyro function to a 3 position switch with down "Off", mid "Hi gain" and up "Low gain". I have mine set to only give negative values (i.e. normal) since I don't use heading hold and don't want to select it by accident.
Disclaimer: This is a "layman's" explanation. There may be a better/more correct way to use the gyro function but my setup works very well for me on both my sport jets.
Craig
07-12-2018, 12:00 PM
#545
There is no "gray" wire with your setup. The "extra cable" is simply to connect an additional power connection/supply from the CB to the CP. The signal wire should not even be connected with the power connection, just the red and black. The CP responds to the gain commands via the serial connections.
FYI, on the "gyro" channel, it's not even necessary to use the "gyro" function. Just use "servo" travel values for the amount of sensitivity you want. 0 (zero) value is gyro "off", negative values are "normal" mode with -100% being max sensitivity and positive values up to +100% are for heading hold. I initially set mine up on a rotary switch with the center position as zero. Slowly dial in gain sensitivity during flight until you find a value you like (i.e. no oscillation at high speed). I then assign the gyro function to a 3 position switch with down "Off", mid "Hi gain" and up "Low gain". I have mine set to only give negative values (i.e. normal) since I don't use heading hold and don't want to select it by accident.
Disclaimer: This is a "layman's" explanation. There may be a better/more correct way to use the gyro function but my setup works very well for me on both my sport jets.
Craig
FYI, on the "gyro" channel, it's not even necessary to use the "gyro" function. Just use "servo" travel values for the amount of sensitivity you want. 0 (zero) value is gyro "off", negative values are "normal" mode with -100% being max sensitivity and positive values up to +100% are for heading hold. I initially set mine up on a rotary switch with the center position as zero. Slowly dial in gain sensitivity during flight until you find a value you like (i.e. no oscillation at high speed). I then assign the gyro function to a 3 position switch with down "Off", mid "Hi gain" and up "Low gain". I have mine set to only give negative values (i.e. normal) since I don't use heading hold and don't want to select it by accident.
Disclaimer: This is a "layman's" explanation. There may be a better/more correct way to use the gyro function but my setup works very well for me on both my sport jets.
Craig
07-12-2018, 09:57 PM
#547
07-13-2018, 02:37 AM
#548
The two position switch that you toggle during the learn process becomes your master. When you went through your basic properties you should have selected Gyro one. Moving over to the Gyro tuning menu you want to change global too separate. You will set one side of your master switch to 0 which will be your off position. I use the flap switch or flight mode switch which ever you prefer to call it to change the gains of the Gyro .
Flaps up would have the lowest gain setting flaps full would have the highest gain setting.
When you’re in the Gyro tuning menu. You can assign a knob or a slider to vary fhe Gain. It is suggested to limit that to 10% you can have it affect all three gains or just one I have it so it only changes the flap up value .
Flaps up would have the lowest gain setting flaps full would have the highest gain setting.
When you’re in the Gyro tuning menu. You can assign a knob or a slider to vary fhe Gain. It is suggested to limit that to 10% you can have it affect all three gains or just one I have it so it only changes the flap up value .
07-15-2018, 12:16 PM
#549
My Feedback: (12)
Question
Im trying to bind my CP but all i get is a steady red light!!! Im using a CB 200 with two receivers. All updates are up to date on the radio and CP.
Also on device explorer i see the CP.
Im planing to mix tailerons with flaps in landing position, do i set up the gyro and then do the mix or mix it first before i bind the gyro?
Suggestions????
Thanks
Im trying to bind my CP but all i get is a steady red light!!! Im using a CB 200 with two receivers. All updates are up to date on the radio and CP.
Also on device explorer i see the CP.
Im planing to mix tailerons with flaps in landing position, do i set up the gyro and then do the mix or mix it first before i bind the gyro?
Suggestions????
Thanks
Last edited by jetsflyin; 07-15-2018 at 12:35 PM.