


Jeti DS-24


 07-06-2018, 02:18 AM
07-06-2018, 02:18 AM
#1003

My Feedback: (1)
Join Date: Feb 2002
Location: private, UNITED KINGDOM
Posts: 3,672
Likes: 0
Received 26 Likes
on
16 Posts
It's possible that you are not charging them correctly. Despite being lithium ions you do not use the Li-ion setting on your charger. The Li-ion peak voltage used by a charger is less than the peak voltage of Jeti Power Ions, so they will be under-charged and therefore give less than the claimed capacity. The peak voltage of Power Ions is 4.2V per cell and you should charge them using the Lipo setting on your charger.
07-06-2018, 05:12 AM
#1004

As some of you know I develop telemetry systems for a number of brands. Jeti is one of them, and Digitech (Sandor) is behind all of my stuff for Jeti 
As I was doing some testing of software and my sensors today, I decided to shoot a small video of a ultimate (a little nerdy) setup
It consists of a RSat2 receiver, my SB-EXT2+2 (2 x Expander ports + 2 x Servo outputs), 4 x CTU, 1 x Jeti MAlti, 1 x Jeti MRPM HALL, 1 x Jeti MBar and 2 servos!
All driven by a DC-24. This setup has 68 sensors in the system (you can only show 40 of these simultaneous on the screen, but all can be used from LUA scripts, alarms etc) and delivers data from 4 turbines, G force, Altimeter, Fuel consumption/reserve in tank,
All of it has of course Device Explorer integration.
More info in the thread: http://www.rcuniverse.com/forum/rc-j...ti-%2A%2A.html
Video is here:
As I was doing some testing of software and my sensors today, I decided to shoot a small video of a ultimate (a little nerdy) setup
It consists of a RSat2 receiver, my SB-EXT2+2 (2 x Expander ports + 2 x Servo outputs), 4 x CTU, 1 x Jeti MAlti, 1 x Jeti MRPM HALL, 1 x Jeti MBar and 2 servos!
All driven by a DC-24. This setup has 68 sensors in the system (you can only show 40 of these simultaneous on the screen, but all can be used from LUA scripts, alarms etc) and delivers data from 4 turbines, G force, Altimeter, Fuel consumption/reserve in tank,
All of it has of course Device Explorer integration.
More info in the thread: http://www.rcuniverse.com/forum/rc-j...ti-%2A%2A.html
Video is here:
 07-06-2018, 01:52 PM
07-06-2018, 01:52 PM
#1006

It's possible that you are not charging them correctly. Despite being lithium ions you do not use the Li-ion setting on your charger. The Li-ion peak voltage used by a charger is less than the peak voltage of Jeti Power Ions, so they will be under-charged and therefore give less than the claimed capacity. The peak voltage of Power Ions is 4.2V per cell and you should charge them using the Lipo setting on your charger.
Dave
07-07-2018, 03:47 AM
#1008
07-07-2018, 06:22 PM
#1009
Hi Dave.. Thanks for the input. When I unplug the BATT2, the amps and volts just drop to zero and don't transfer. BATT1 seems to just operate normally.
07-07-2018, 08:09 PM
#1010
07-09-2018, 11:33 AM
#1012
My Feedback: (20)
Any of the Jeti guru guys have a suggestion?
Thanks,
Gary
07-09-2018, 11:37 AM
#1013
My Feedback: (19)
I am using the mFlow. I set up a switch to reset the mflow bacck to 100% capactiy. It will work fine for a flight or 2 and then I have to flip the switch over and over until it finally resets. Can't figure that out.
 07-16-2018, 06:42 PM
07-16-2018, 06:42 PM
#1015
hoping for some help with my DS 24
I am trying to set up different vector thrust throws on my flight mode switch SA. I have the pitch and yaw vector servos free mixed with respective master elevator rudder servos and on S not G.. Then set up to flight mode switch. In position 1 the servos do not move which is what I want. In the free mix the values are 0. In position 2 the values are 50 for both ele and rud and the vector thrust nozzle moves appropriately. In position 3 the values are 80 for rud and ele but the servos are not moving. What am I missing or doing wrong?
Thanks
Roy
I am trying to set up different vector thrust throws on my flight mode switch SA. I have the pitch and yaw vector servos free mixed with respective master elevator rudder servos and on S not G.. Then set up to flight mode switch. In position 1 the servos do not move which is what I want. In the free mix the values are 0. In position 2 the values are 50 for both ele and rud and the vector thrust nozzle moves appropriately. In position 3 the values are 80 for rud and ele but the servos are not moving. What am I missing or doing wrong?
Thanks
Roy
07-16-2018, 06:47 PM
#1016
Is anyone running an APS PowerFuel RX pump with Jeti? I'm running the pump on two planes and had some issues one. In doing some research, I noticed on the Hacker website a small footnote that stated, "Note for use with a JETI duplex system: The pulse frequency of the system should be set to 8 or 20 milliseconds. If the pulse frequency is set to "AUTO", malfunctions of the pump electronics are possible."
I guess I'm a little confused and wondering if someone can provide some clarity on this statement.....
I guess I'm a little confused and wondering if someone can provide some clarity on this statement.....
Last edited by rbgetz; 07-17-2018 at 04:13 AM.
07-17-2018, 07:09 AM
#1017

hoping for some help with my DS 24
I am trying to set up different vector thrust throws on my flight mode switch SA. I have the pitch and yaw vector servos free mixed with respective master elevator rudder servos and on S not G.. Then set up to flight mode switch. In position 1 the servos do not move which is what I want. In the free mix the values are 0. In position 2 the values are 50 for both ele and rud and the vector thrust nozzle moves appropriately. In position 3 the values are 80 for rud and ele but the servos are not moving. What am I missing or doing wrong?
Thanks
Roy
I am trying to set up different vector thrust throws on my flight mode switch SA. I have the pitch and yaw vector servos free mixed with respective master elevator rudder servos and on S not G.. Then set up to flight mode switch. In position 1 the servos do not move which is what I want. In the free mix the values are 0. In position 2 the values are 50 for both ele and rud and the vector thrust nozzle moves appropriately. In position 3 the values are 80 for rud and ele but the servos are not moving. What am I missing or doing wrong?
Thanks
Roy
If you don't like playing with curve values, If you've created Functions, you can then also assign Rates to each function. Set your rates for those functions to S and simply assign the desired rate for each flight mode with the rates set to 0 where no thrust vectoring is desired.
Hope this helps.
 07-22-2018, 01:49 AM
07-22-2018, 01:49 AM
#1019
I've had the same question. If there is a way to do that with the stock Jeti sensor and TX settings that would be great but I don't know of any. But I am still a relative Jeti newbie.
But, along these same lines, my friend Walt L. made an interesting suggestion that instead of calling out airspeed every N seconds, perhaps enabled by a switch (that's how I've always done it on my Futaba systems, and so far on Jeti) , it would be nice to have a speed announce only when it changed by, say, 10mph. I have a prototype lua extension working that has the following capabilities:
1) you select the speed sensor (e.g. pitot-static or gps) with the typical Jeti menu
2) you set the interval for changes in speed .. it announces the speed (with no decimals .. rounded to a whole number!) only when it changes by the interval you set (typically 10 mph)
3) you can set a max speed (e.g. 200mph) and get a warning if you pass that speed
4) you can set a "Vref" speed (e.g. 1.3 * Vs0 .. where Vs0 is the power-off stall speed) ... at or below Vref it calls out speed every <n> seconds where n is settable (usually 2 sec) .. so it works automatically on final approach .. it starts announcing independent of the interval changes (like Carsten's stand-alone telemetry system for his ASSI)
5) you can get a stall warning with stick shaker at Vs0
There are a few other options, but I think you get the idea. I learned a lot from studying Tero's "RC Thoughts" site, and was inspired by his altitude announcer lua extension that helps aerotowing pilots. I'd be delighted to take feedback on the requirements and features for this extension as I finish up a workable version 1.
After I bang on it a bit, I'll post the link to the github repository if anyone here wants to try it, but I have to send it to Walt first :-)
I've also been working on a companion "super timer" lua extension that announces flight time and fuel state every 30 seconds, and also keeps track of main battery current and voltage from the CB400.
Dave
Last edited by ww2birds; 07-22-2018 at 02:51 AM.
07-22-2018, 02:06 AM
#1020
It's possible that you are not charging them correctly. Despite being lithium ions you do not use the Li-ion setting on your charger. The Li-ion peak voltage used by a charger is less than the peak voltage of Jeti Power Ions, so they will be under-charged and therefore give less than the claimed capacity. The peak voltage of Power Ions is 4.2V per cell and you should charge them using the Lipo setting on your charger.
Thanks for the great suggestion. I did not realize that they should not be charged as LiIon. Given how cautious we all are with any Li-based battery I found it interesting that the pack had a label that said "Nominal Voltage: 7.2V max". That led me to treat them as LiIon. Oh, and they are labelled "Power Ion" :-)
So I was _very_ careful about where I put them when I tried to charge them as LiPos to 8.4V in case of any safety issue. But of course they were fine (btw I was using the AstroFlight charger in both cases .. to charge as LiIon with the A123/LiIon charger and as LiPo with their Lithium charger).
The discharge curves for the two packs, charged as LiIon then as LiPo, are posted below. I discharged with a West Mountain Radio CBA II set for a 1A discharge current.
Just as you suspect, I was not fully charging them when treating them as LiIon. I only took them down to 6V in the test below but the capacity looks plausibly close to the spec when charged properly.
Interesting too see how different the discharge curve is than an A123 which is much flatter...
Dave
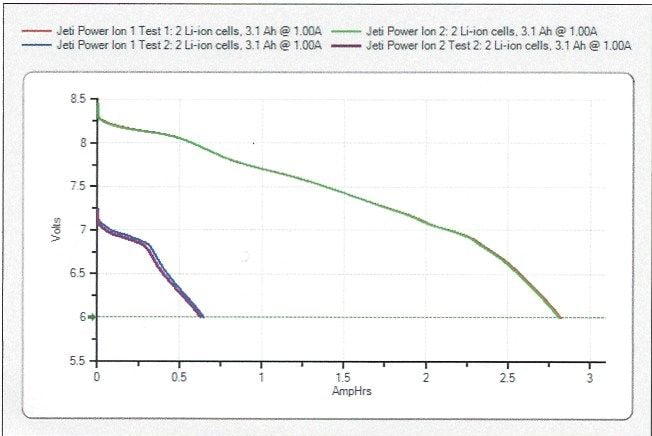
Jeti Power Ion pack, charged as LiIon and LiPo.
Last edited by ww2birds; 07-22-2018 at 02:09 AM.
07-22-2018, 02:38 AM
#1021
Based on feedback from Wayne, Danny and others, the hybrid PSS 2018/CB200 setup, while it worked fine, was seen as a bit of a kludge. I have to agree.
So I decided to go more "native Jeti" and put a CB400 into the plane. But I wanted to still hang on to the nice Sbus Emcotec wiring and connectors.
For the tail, I placed a CB100 "satellite" in the tail area. Since there is only one servo in each elevator half and in the fin, I was able to keep the Emcotec connectors and just solder up an adapter to go into the servo outputs of the CB100. I arranged the wiring at the CB400 to send the EXBus on the white wire of the former Sbus feed, and took power and ground from one of the BEC outputs on the CB400. The spec says they are good for 6A. So this is a nice clean setup. 6A should be plenty for the rudder and elevator. In-flight telemetry from the CB100 is confirming this.
For the wings, I have two servos (ail and flp), thru one Emcotec connector, classic Sbus. So i could replicate the tail setup with a CB100 in each wing as the Esprittech video did. But instead I used the SlinkE device that converts EXBus to Sbus (https://www.rconix.com/collections/s-bus-converters). Very nice device (and a very nice guy too!).
The SlinkE feeds the white/signal wire of the wing connectors. That left me with one BEC output open and I was concerned from prior measurements that 6A would be marginal for the two flaps. I've set telemetry alarms on 4A draw for each battery (from the CB400 telemetry signals) and it's actually interesting/slightly alarming how often this triggers in flight .. which means a total of 8A being drawn... yikes!
Since I am trying to be a good Jeti citizen, I had been reading the manual AND release notes on the CB400, and saw in a recent note that Jeti commented on the polyfuse devices in the CB400 possibly being tripped by high torque servos and explicitly contradicting the manual, they recommended paralleling power and ground (but of course not signal) from multiple servo outputs on the CB400 (up to 8 they said!) to gain additional current drive capability for high-draw servos. I know a little about polyfuses, and let's just say using them in parallel is controversial, but I went ahead anyway based on Jeti's recommendations.
So what I have is a parallel connection of three servo power + grounds from three CB400 outputs, that feeds the red + black (power) wires .. for each wing .. and white/signal wires fed by the Sbus output generated by the SlinkE device. This then routes thru the standard Sbus wiring to the wing and its one connector. Channel numbers on the Jeti and EXbus were purposely set up to be the same as on the Futaba Sbus system.
The two Rx's connect to the Cortex pro, the Cortex connects to the two primary 2.4GHz inputs on the CB400, and the 900MHz to its CB400 input as recommended by Jeti.
Net: much simpler, much cleaner system, all works exactly as I hoped.
For others doing PSS/DPSI 2018 conversions, I think if all you want to do is two 2.4GHz Rx's and a Cortex or Cortex Pro, then it's easy to keep the 2018. It really was the proper integration of the 900MHz that drove all the complexity with the 2018 setup. But to me the 900MHz backup is a major reason to use Jeti so to convert without it seemed like a waste of time.
I do have some more work to do to characterize the multiple parallel polyfuses and make sure I know how they really operate ... I've got a stack of power resistors on hand to do the testing and once I have the work done, I'll report back. I could not find a specific spec on the polyfuses used in the CB400 but I am guessing approx 4A. If anyone knows more, please let me know.
The only irritating issue left: I setup the remote on/off with the RF switch for the CB400. (I added one of the locking switches to the TX as recommended). Jeti gives a spec for the current draw with the CB400 in this configuration when turned off (140 uA) .. but I see MUCH larger current draw than that, and it is draining my RX packs in a few days .. so I am realistically going to have to unplug the batteries between flying sessions which really limits the attractiveness of the remote on/off. If it really met the 140 uA spec, which would take about 2 yrs to drain a 2.3Ah battery .. so something is up. I'll be checking into this. Again, if anyone knows more, I am all ears... My current theory is that the R3/RSW does not come close to meeting the 140uA spec .. Jeti must be referring to what happens with the magnetic switch or perhaps some other RF switch. If that's the case, then I can just switch off the R3/RSW instead of actually unplugging the batteries...
Oh .. one more thing .. given all the questions I have about individual servo current draw, I am really interested to know if/when we will have Ditex servo capability in the CB400. ZB's original postings suggested this was coming but unless I missed it in the CB400 release notes it's not out yet. Only the RX support it for directly-connected servos. I humbly submit that this is cute but useless .. if you were worried about these measurements you would not have servos connecting direct to an RX!
(sorry for all the posts! catching up after travelling!)
Dave
Last edited by ww2birds; 07-22-2018 at 02:49 AM.
07-22-2018, 05:41 AM
#1022
My Feedback: (20)
Gary,
I've had the same question. If there is a way to do that with the stock Jeti sensor and TX settings that would be great but I don't know of any. But I am still a relative Jeti newbie....
I have a prototype lua extension working that has the following capabilities:
Dave
I've had the same question. If there is a way to do that with the stock Jeti sensor and TX settings that would be great but I don't know of any. But I am still a relative Jeti newbie....
I have a prototype lua extension working that has the following capabilities:
Dave
This Lua extension sounds great. I would love to have that capability. I understand all you said about how it could work, but I have no clue how to install and use a LUA extension. I am a Jeti newbie also.
Gary
Currently I am trying to figure out how to use the servo balancer to match two servos on the same elevon surface. Does anyone know of a video that shows how to do it. I can only find one that just says it is there.
Thx Gary
Last edited by Viper1GJ; 07-22-2018 at 05:44 AM.
07-22-2018, 08:07 AM
#1023
Gary,
It's not hard to install .. basically you just plug the TX into a computer with the USB cable, then it looks like an external disk .. just like when you update the transmitter firmware if you've done that.
The Jeti studio app is very nice .. you might consider downloading it from Jeti .. it is very helpful for hiding some of the complexity.
You copy the lua file (e.g. speedannouncer.lua) from your computer into the Apps directory on the transmitter which is mounted to your PC as a disk. Then you can install it from the applications menu on the TX. When I post the code, I'll put up a simple process. Probably Esprit has some videos on it.
Dave
It's not hard to install .. basically you just plug the TX into a computer with the USB cable, then it looks like an external disk .. just like when you update the transmitter firmware if you've done that.
The Jeti studio app is very nice .. you might consider downloading it from Jeti .. it is very helpful for hiding some of the complexity.
You copy the lua file (e.g. speedannouncer.lua) from your computer into the Apps directory on the transmitter which is mounted to your PC as a disk. Then you can install it from the applications menu on the TX. When I post the code, I'll put up a simple process. Probably Esprit has some videos on it.
Dave
07-27-2018, 08:33 AM
#1025
Best of luck to the JETI team at the F5D World Championship in Japan! Go fast, turn left!
Looks like tons of winners :-).
0726_f5d_wc_results_overall_team.pdf
0726_f5d_wc_results.pdf


Looks like tons of winners :-).
0726_f5d_wc_results_overall_team.pdf
0726_f5d_wc_results.pdf