Let's move on and sorry for the slowness...
")
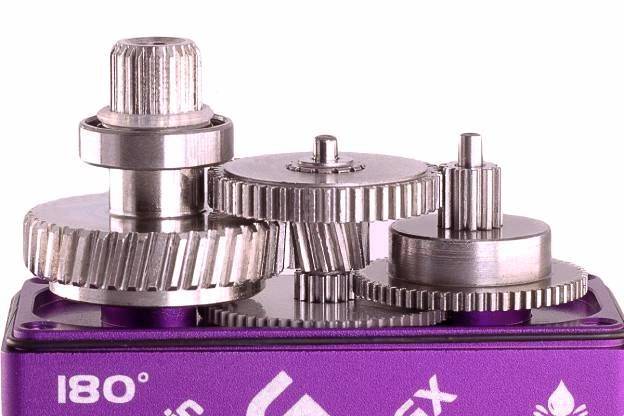
The Yantrs B0850MGX-E servo has an aluminum case, weighs 80 grams and has a reduced depth (measures 40x20x38mm); the rotation shaft has 2 classic bearings and is also pleasing to the eye. It can be powered from 6 to 8.4 volts developing a torque of 50kg at 8.4v (0.08s) and 46kg at 7.4v (0.09s), 36kg at 6v (0.12s). The rotation is 180� but adjustable via programmer.
In the application (downloadable online) to program the Yantrs servos you can find all the main values (more or less identical to other servos with similar characteristics) such as power, rotation angle, speed, servo center, dead zone, reverse, fail-safe etc. Furthermore, in the software there is also the possibility of applying different types of servo management modes depending on the Rx: in addition to the standard mode, there are SR, SSR, SFR, SXR, UR modes, each with min. parameters. pre-set PWM max and midle. I'm not very knowledgeable in this matter but I've read that they affect the amplitude of the servo's movement, power and speed.

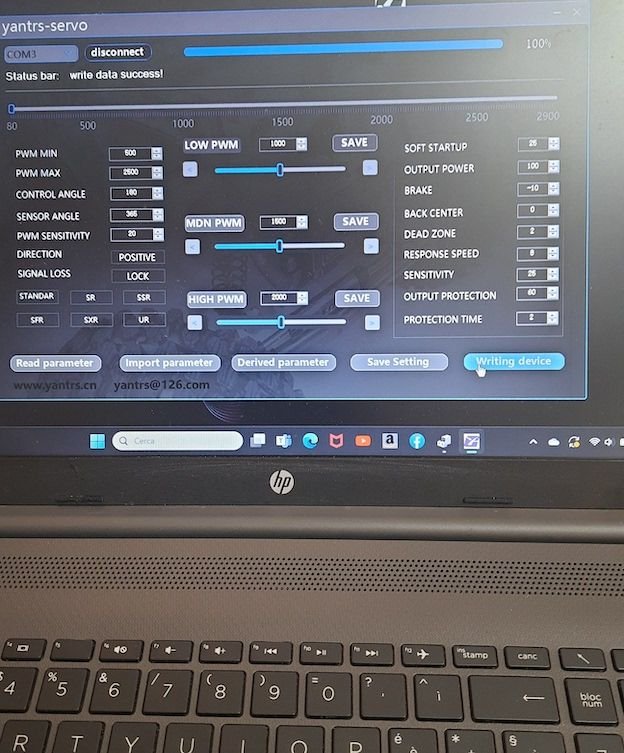

By reading a little I understood that the SSR mode is the one that more than others manages to increase the responsiveness of the servo with shorter pulses, which theoretically allows you to increase the transmission speed to more than 384 Hz, thus allowing you to transmit the gear position to the servo more frequently, e.g. reduce what is called latency here (the time needed to propagate the change in position of the steering wheel to the change in position of the car's wheels).
However, it appears that there is currently no transmitter on the market that uses a 384Hz frequency�
These servos do not emit hum and thanks to the slow power delay function at start-up they move to the neutral position slowly without jerks. Operation appears smooth and without any hesitation. The equipment is also excellent and includes a very sturdy aluminum square with two slip-proof fixing bolts on the crown. Some doubts about the servo rubbers which are the traditional round ones while I would have preferred the more robust square ones. But it's a detail...