


75MHz Ground Radio Range Problems
 10-25-2011, 06:34 PM
10-25-2011, 06:34 PM
#1
Junior Member
Thread Starter
Join Date: Oct 2011
Location: Kamuela, HI
Posts: 2
Likes: 0
Received 0 Likes
on
0 Posts
I'm building a 6WD robot for a friend of mine. The chassis is a Dagu Wild Thumper from Pololu Robotics. It uses six DC gearmotors to drive the wheels. The motors are ganged three and three, and are driven by a pair of ESCs also made by Pololu. This part of the robot is working fine.
The robot also has a pan/tilt head from Servo City. It uses off the shelf Hitec servos. I've got some balance issues on the pan/tilt head, but otherwise this is also working fine.
Where I'm running into issues is the radio. I originally built the robot to take a 75MHz ground radio so I could have 2.4GHz avaialble for video. I chose a Hitec Laser 6, but now I'm not sure this was such a good decision. It suffers from really bad range problems. With the antenna collapsed it can barely go thirty feet. With it fully extended, it loses signal at about a hundred feet.
I tested the robot with a 2.4GHz radio, which performed just fine. I lost usable visual range well before I lost radio signal. This setup had no problem running the drive system as well as tthe pan/tilt head. But of course it meant the video hardware I was using utterly failed.
The whole purpose of this thing is to drive a DSLR camera up to a subject and allow a photographer to compose and photograph the subject. It's not really an FPV project in that sense. So the video hardware is a little unconventional. Right now I'm using a Hahnel Inspire set up for Canon cameras. The Hahnel hardware is strictly 2.4GHz. No other band is offered. So if I continue to use this I can't use a 2.4GHz radio to control the robot.
I'd really like to get the 75MHz ground radio system to work. I've got the antenna taped to a 1/4" hardwood dowel, which is mounted to the back of the robot. This should keep the antenna wire well clear of the rest of the robot, but it didn't help the range as much as I would've liked. I also twisted all the motor leads to try to get rid of any induced RF. One thing I haven't done is to disassemble all the drive motor assemblies to add filter caps to the motors themselves. Do you think this would be a good next move before really digging into the radio?
Or am I on a fool's errand at this point, and would be better served by changing the radio and video hardware I'm using?
Thanks,
Tom
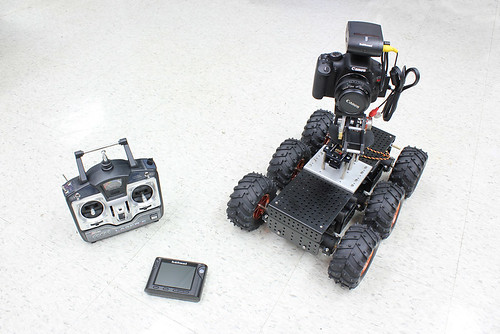
Crawler 1 by t.benedict, on Flickr
The robot also has a pan/tilt head from Servo City. It uses off the shelf Hitec servos. I've got some balance issues on the pan/tilt head, but otherwise this is also working fine.
Where I'm running into issues is the radio. I originally built the robot to take a 75MHz ground radio so I could have 2.4GHz avaialble for video. I chose a Hitec Laser 6, but now I'm not sure this was such a good decision. It suffers from really bad range problems. With the antenna collapsed it can barely go thirty feet. With it fully extended, it loses signal at about a hundred feet.
I tested the robot with a 2.4GHz radio, which performed just fine. I lost usable visual range well before I lost radio signal. This setup had no problem running the drive system as well as tthe pan/tilt head. But of course it meant the video hardware I was using utterly failed.
The whole purpose of this thing is to drive a DSLR camera up to a subject and allow a photographer to compose and photograph the subject. It's not really an FPV project in that sense. So the video hardware is a little unconventional. Right now I'm using a Hahnel Inspire set up for Canon cameras. The Hahnel hardware is strictly 2.4GHz. No other band is offered. So if I continue to use this I can't use a 2.4GHz radio to control the robot.
I'd really like to get the 75MHz ground radio system to work. I've got the antenna taped to a 1/4" hardwood dowel, which is mounted to the back of the robot. This should keep the antenna wire well clear of the rest of the robot, but it didn't help the range as much as I would've liked. I also twisted all the motor leads to try to get rid of any induced RF. One thing I haven't done is to disassemble all the drive motor assemblies to add filter caps to the motors themselves. Do you think this would be a good next move before really digging into the radio?
Or am I on a fool's errand at this point, and would be better served by changing the radio and video hardware I'm using?
Thanks,
Tom
Crawler 1 by t.benedict, on Flickr
 10-26-2011, 03:03 AM
10-26-2011, 03:03 AM
#2
Senior Member
Never run a transmitter with the antenna collapsed for more than a minute or two as it may damage the output stage. With the antenna collapsed the bulk of the power is reflected back into the output stage and will overheat it with a high probability of damage when the temperature climbs to a certain point. With antenna extended on the transmitter (and no damage there) the range is determined primarily by the receiver characteristics. Your range problem is most probably receiver related, not transmitter unless you have damaged the output stage of the transmitter by extended operation with the antenna collapsed or removed.
10-26-2011, 03:14 AM
#3

My Feedback: (2)
ORIGINAL: benedict
I'm building a 6WD robot for a friend of mine. The chassis is a Dagu Wild Thumper from Pololu Robotics. It uses six DC gearmotors to drive the wheels. The motors are ganged three and three, and are driven by a pair of ESCs also made by Pololu. This part of the robot is working fine.
The robot also has a pan/tilt head from Servo City. It uses off the shelf Hitec servos. I've got some balance issues on the pan/tilt head, but otherwise this is also working fine.
Where I'm running into issues is the radio. I originally built the robot to take a 75MHz ground radio so I could have 2.4GHz avaialble for video. I chose a Hitec Laser 6, but now I'm not sure this was such a good decision. It suffers from really bad range problems. With the antenna collapsed it can barely go thirty feet. With it fully extended, it loses signal at about a hundred feet.
I tested the robot with a 2.4GHz radio, which performed just fine. I lost usable visual range well before I lost radio signal. This setup had no problem running the drive system as well as tthe pan/tilt head. But of course it meant the video hardware I was using utterly failed.
The whole purpose of this thing is to drive a DSLR camera up to a subject and allow a photographer to compose and photograph the subject. It's not really an FPV project in that sense. So the video hardware is a little unconventional. Right now I'm using a Hahnel Inspire set up for Canon cameras. The Hahnel hardware is strictly 2.4GHz. No other band is offered. So if I continue to use this I can't use a 2.4GHz radio to control the robot.
I'd really like to get the 75MHz ground radio system to work. I've got the antenna taped to a 1/4'' hardwood dowel, which is mounted to the back of the robot. This should keep the antenna wire well clear of the rest of the robot, but it didn't help the range as much as I would've liked. I also twisted all the motor leads to try to get rid of any induced RF. One thing I haven't done is to disassemble all the drive motor assemblies to add filter caps to the motors themselves. Do you think this would be a good next move before really digging into the radio?
Or am I on a fool's errand at this point, and would be better served by changing the radio and video hardware I'm using?
Thanks,
Tom
Crawler 1 by t.benedict, on Flickr
I'm building a 6WD robot for a friend of mine. The chassis is a Dagu Wild Thumper from Pololu Robotics. It uses six DC gearmotors to drive the wheels. The motors are ganged three and three, and are driven by a pair of ESCs also made by Pololu. This part of the robot is working fine.
The robot also has a pan/tilt head from Servo City. It uses off the shelf Hitec servos. I've got some balance issues on the pan/tilt head, but otherwise this is also working fine.
Where I'm running into issues is the radio. I originally built the robot to take a 75MHz ground radio so I could have 2.4GHz avaialble for video. I chose a Hitec Laser 6, but now I'm not sure this was such a good decision. It suffers from really bad range problems. With the antenna collapsed it can barely go thirty feet. With it fully extended, it loses signal at about a hundred feet.
I tested the robot with a 2.4GHz radio, which performed just fine. I lost usable visual range well before I lost radio signal. This setup had no problem running the drive system as well as tthe pan/tilt head. But of course it meant the video hardware I was using utterly failed.
The whole purpose of this thing is to drive a DSLR camera up to a subject and allow a photographer to compose and photograph the subject. It's not really an FPV project in that sense. So the video hardware is a little unconventional. Right now I'm using a Hahnel Inspire set up for Canon cameras. The Hahnel hardware is strictly 2.4GHz. No other band is offered. So if I continue to use this I can't use a 2.4GHz radio to control the robot.
I'd really like to get the 75MHz ground radio system to work. I've got the antenna taped to a 1/4'' hardwood dowel, which is mounted to the back of the robot. This should keep the antenna wire well clear of the rest of the robot, but it didn't help the range as much as I would've liked. I also twisted all the motor leads to try to get rid of any induced RF. One thing I haven't done is to disassemble all the drive motor assemblies to add filter caps to the motors themselves. Do you think this would be a good next move before really digging into the radio?
Or am I on a fool's errand at this point, and would be better served by changing the radio and video hardware I'm using?
Thanks,
Tom
Crawler 1 by t.benedict, on Flickr
The state of your Tx and Rx batteries affects Range and how you route the antenna.
 10-26-2011, 04:16 PM
10-26-2011, 04:16 PM
#5
Junior Member
Thread Starter
Join Date: Oct 2011
Location: Kamuela, HI
Posts: 2
Likes: 0
Received 0 Likes
on
0 Posts
Rodney, thanks for the information about potentially damaging the output stage of the transmitter when running with the antenna collapsed. I didn't run it for more than about 30 seconds that way, and I only did it once. The range issues have been there from the get-go, so I hope I haven't damaged it. But I can give it a thorough test the next time I work on it.
BuschBarber, I tested the 2.4GHz radio with the video, and the video cut out after only a few feet. As soon as I turned off the 2.4GHz Tx the video came back. So there's pretty clear interference.
Thanks for bringing up batteries. With all of these tests I've made sure to get a full charge on both Rx and Tx batteries. The Tx has its own battery and charger, which I used to put a full charge on its battery. The Rx is powered from two 7.4v NiMH batteries, wired in series, and fed through a 5V 5A regulator. So the power should be clean. But I haven't verified this with an oscilloscope, so I don't know if motor noise is making its way through the regulator and to the Rx. In any case the same power arrangement was used on both the 75MHz radio and the 2.4GHz radio.
I'll look at the Deans base loaded whip antenna.
Sport_Pilot, that may be my next step. It's only my second experience with a 75MHz radio, so I'm a little in the dark. But I've had gobs of range out of my 72MHz gear, so I was a little surprised to see how poorly this one has been performing. I'm going to be bummed if I find out I've been banging my head against this for months because of a badly tuned radio, but at least it would be an easy fix if that's the case. Thanks for the suggestion.
Again, thanks, all of you, for your input. This helps a ton.
Tom
BuschBarber, I tested the 2.4GHz radio with the video, and the video cut out after only a few feet. As soon as I turned off the 2.4GHz Tx the video came back. So there's pretty clear interference.
Thanks for bringing up batteries. With all of these tests I've made sure to get a full charge on both Rx and Tx batteries. The Tx has its own battery and charger, which I used to put a full charge on its battery. The Rx is powered from two 7.4v NiMH batteries, wired in series, and fed through a 5V 5A regulator. So the power should be clean. But I haven't verified this with an oscilloscope, so I don't know if motor noise is making its way through the regulator and to the Rx. In any case the same power arrangement was used on both the 75MHz radio and the 2.4GHz radio.
I'll look at the Deans base loaded whip antenna.
Sport_Pilot, that may be my next step. It's only my second experience with a 75MHz radio, so I'm a little in the dark. But I've had gobs of range out of my 72MHz gear, so I was a little surprised to see how poorly this one has been performing. I'm going to be bummed if I find out I've been banging my head against this for months because of a badly tuned radio, but at least it would be an easy fix if that's the case. Thanks for the suggestion.
Again, thanks, all of you, for your input. This helps a ton.
Tom
