


FRSky Taranis Beginners Support Group
 08-05-2021, 12:02 PM
08-05-2021, 12:02 PM
#326

Never heard of the pump before, but a quick search and it looks like a neat addition for a multi-cylinder engine!
Look at your Outputs screen on the radio, and move the cursor down so that Ch 8 is selected. At the very top of the screen you should see the millisecond pulse width currently being sent out on the channel, for different stick positions. Default OpenTX defines "Min" as -512, and "Max" as +512, but shows it as +/-100% on the outputs page settings for each channel. Center is 1500. So full low = 1500-512 or 988, and full high = 1500+512. or 2012.
So, first check - are the numbers changing as you move the throttle stick? Probably from 988 to 1704 with your curve, but don't worry if they are different, we just want to make sure it is sending something out!
If they aren't changing, you have something wrong in Inputs or Mixing.
If they are, then things are close in the TX and you should be getting the pump doing something. Start by eliminating the curve.
The pump directions says that full low (off) should be 1100 us, and full high (max flow) be 1900 us. This is what Spektrum uses for their servos. It would be the same as you setting Min and Max in Outputs for ch 8 to +/- 78%. Changing to this will make it respond more accurately, but even with default +/-100 it should still work at middle to high range stick positions. If it is not doing anything at all, in any stick position, and the numbers are changing, then you have an issue with the RX or (most likely) the pump itself.
If you then want to add the curve back in, you may - and if it stops working, then you have something off with the curve itself.
Look at your Outputs screen on the radio, and move the cursor down so that Ch 8 is selected. At the very top of the screen you should see the millisecond pulse width currently being sent out on the channel, for different stick positions. Default OpenTX defines "Min" as -512, and "Max" as +512, but shows it as +/-100% on the outputs page settings for each channel. Center is 1500. So full low = 1500-512 or 988, and full high = 1500+512. or 2012.
So, first check - are the numbers changing as you move the throttle stick? Probably from 988 to 1704 with your curve, but don't worry if they are different, we just want to make sure it is sending something out!
If they aren't changing, you have something wrong in Inputs or Mixing.
If they are, then things are close in the TX and you should be getting the pump doing something. Start by eliminating the curve.
The pump directions says that full low (off) should be 1100 us, and full high (max flow) be 1900 us. This is what Spektrum uses for their servos. It would be the same as you setting Min and Max in Outputs for ch 8 to +/- 78%. Changing to this will make it respond more accurately, but even with default +/-100 it should still work at middle to high range stick positions. If it is not doing anything at all, in any stick position, and the numbers are changing, then you have an issue with the RX or (most likely) the pump itself.
If you then want to add the curve back in, you may - and if it stops working, then you have something off with the curve itself.
 08-05-2021, 01:53 PM
08-05-2021, 01:53 PM
#327
After rereading, I probably should have backed up a bit, since this is a beginners thread...
Servos (and most other devices) detect a pulse coming from the receiver. The length of time it takes determines the position. Usually a pulse of 1500 milliseconds ("us") tells it to center. Some brands use slightly different centering. Increasing the time makes it go one way, and decreasing it the other. Spektrum, as noted, uses a range of 1100 to 1900. OpenTX, by default uses 988 to 2012, so it tells the servo to turn more than Spektrum. Almost all brands convert their numbers to percents, for user ease of use. So 100% for one brand is different from another brand. Hence the +/-78% I noted above to get it to produce what the pump calls for.
About the curve...OpenTX defines the stick and output position for a curve to be -100 to +100. Other brands call it 0 to 100. So when setting it up, you may have to do some mental conversion - ie "0" would be -100 on the OpenTX curve, 50 ("halfway") would be the same as 0 in OpenTx, 75 would be +50, etc. So, perhaps, you may be hobbling the output by using another brands settings in OpenTX without converting....
Servos (and most other devices) detect a pulse coming from the receiver. The length of time it takes determines the position. Usually a pulse of 1500 milliseconds ("us") tells it to center. Some brands use slightly different centering. Increasing the time makes it go one way, and decreasing it the other. Spektrum, as noted, uses a range of 1100 to 1900. OpenTX, by default uses 988 to 2012, so it tells the servo to turn more than Spektrum. Almost all brands convert their numbers to percents, for user ease of use. So 100% for one brand is different from another brand. Hence the +/-78% I noted above to get it to produce what the pump calls for.
About the curve...OpenTX defines the stick and output position for a curve to be -100 to +100. Other brands call it 0 to 100. So when setting it up, you may have to do some mental conversion - ie "0" would be -100 on the OpenTX curve, 50 ("halfway") would be the same as 0 in OpenTx, 75 would be +50, etc. So, perhaps, you may be hobbling the output by using another brands settings in OpenTX without converting....
08-06-2021, 03:49 AM
#328
Never heard of the pump before, but a quick search and it looks like a neat addition for a multi-cylinder engine!
Look at your Outputs screen on the radio, and move the cursor down so that Ch 8 is selected. At the very top of the screen you should see the millisecond pulse width currently being sent out on the channel, for different stick positions. Default OpenTX defines "Min" as -512, and "Max" as +512, but shows it as +/-100% on the outputs page settings for each channel. Center is 1500. So full low = 1500-512 or 988, and full high = 1500+512. or 2012.
So, first check - are the numbers changing as you move the throttle stick? Probably from 988 to 1704 with your curve, but don't worry if they are different, we just want to make sure it is sending something out!
If they aren't changing, you have something wrong in Inputs or Mixing.
If they are, then things are close in the TX and you should be getting the pump doing something. Start by eliminating the curve.
The pump directions says that full low (off) should be 1100 us, and full high (max flow) be 1900 us. This is what Spektrum uses for their servos. It would be the same as you setting Min and Max in Outputs for ch 8 to +/- 78%. Changing to this will make it respond more accurately, but even with default +/-100 it should still work at middle to high range stick positions. If it is not doing anything at all, in any stick position, and the numbers are changing, then you have an issue with the RX or (most likely) the pump itself.
If you then want to add the curve back in, you may - and if it stops working, then you have something off with the curve itself.
Look at your Outputs screen on the radio, and move the cursor down so that Ch 8 is selected. At the very top of the screen you should see the millisecond pulse width currently being sent out on the channel, for different stick positions. Default OpenTX defines "Min" as -512, and "Max" as +512, but shows it as +/-100% on the outputs page settings for each channel. Center is 1500. So full low = 1500-512 or 988, and full high = 1500+512. or 2012.
So, first check - are the numbers changing as you move the throttle stick? Probably from 988 to 1704 with your curve, but don't worry if they are different, we just want to make sure it is sending something out!
If they aren't changing, you have something wrong in Inputs or Mixing.
If they are, then things are close in the TX and you should be getting the pump doing something. Start by eliminating the curve.
The pump directions says that full low (off) should be 1100 us, and full high (max flow) be 1900 us. This is what Spektrum uses for their servos. It would be the same as you setting Min and Max in Outputs for ch 8 to +/- 78%. Changing to this will make it respond more accurately, but even with default +/-100 it should still work at middle to high range stick positions. If it is not doing anything at all, in any stick position, and the numbers are changing, then you have an issue with the RX or (most likely) the pump itself.
If you then want to add the curve back in, you may - and if it stops working, then you have something off with the curve itself.
Question:- If the pump literature indicates that full low (off) should be 1100us, and full high (max flow) should be 1900us and my output with the curve is 1470us at stick position -100 to 1311us at stick position +100, what could cause the pump not to operate? My output was well within the operating range of the pump.
Out of frustration and wanting to feel like I made some progress, I changed the mix on Channel 8 where source is set to MAX and it would be turned on with switch SF. This worked to some degree with the pump operating at constant speed. With this mix, the output is 988us when off and 1500us when on.
I am going to play with the curve so that at some point the output is 1500us.
I will report in a few minutes.
Thanks again.
DaleD
 08-06-2021, 04:09 AM
08-06-2021, 04:09 AM
#329
THANK YOU for such a detailed response. I was going out of my mind yesterday not being able to figure this out. I now realise what could be causing the issue. I checked the output screen as you suggested; the numbers in the top left of the screen change from 1470us at stick position -100 to 1311us at stick position +100.(I figure the numbers should be increasing so I may need to invert). The video shows what�s currently happening. https://youtu.be/Oj2MgWWyEO0
Question:- If the pump literature indicates that full low (off) should be 1100us, and full high (max flow) should be 1900us and my output with the curve is 1470us at stick position -100 to 1311us at stick position +100, what could cause the pump not to operate? My output was well within the operating range of the pump.
Out of frustration and wanting to feel like I made some progress, I changed the mix on Channel 8 where source is set to MAX and it would be turned on with switch SF. This worked to some degree with the pump operating at constant speed. With this mix, the output is 988us when off and 1500us when on.
I am going to play with the curve so that at some point the output is 1500us.
I will report in a few minutes.
Thanks again.
DaleD
Question:- If the pump literature indicates that full low (off) should be 1100us, and full high (max flow) should be 1900us and my output with the curve is 1470us at stick position -100 to 1311us at stick position +100, what could cause the pump not to operate? My output was well within the operating range of the pump.
Out of frustration and wanting to feel like I made some progress, I changed the mix on Channel 8 where source is set to MAX and it would be turned on with switch SF. This worked to some degree with the pump operating at constant speed. With this mix, the output is 988us when off and 1500us when on.
I am going to play with the curve so that at some point the output is 1500us.
I will report in a few minutes.
Thanks again.
DaleD
I believe something else isn�t right. With the hope I can get further help figuring things out, I�m sharing a video of the actual mix.
Also, please see a picture of how the curve is set up below.
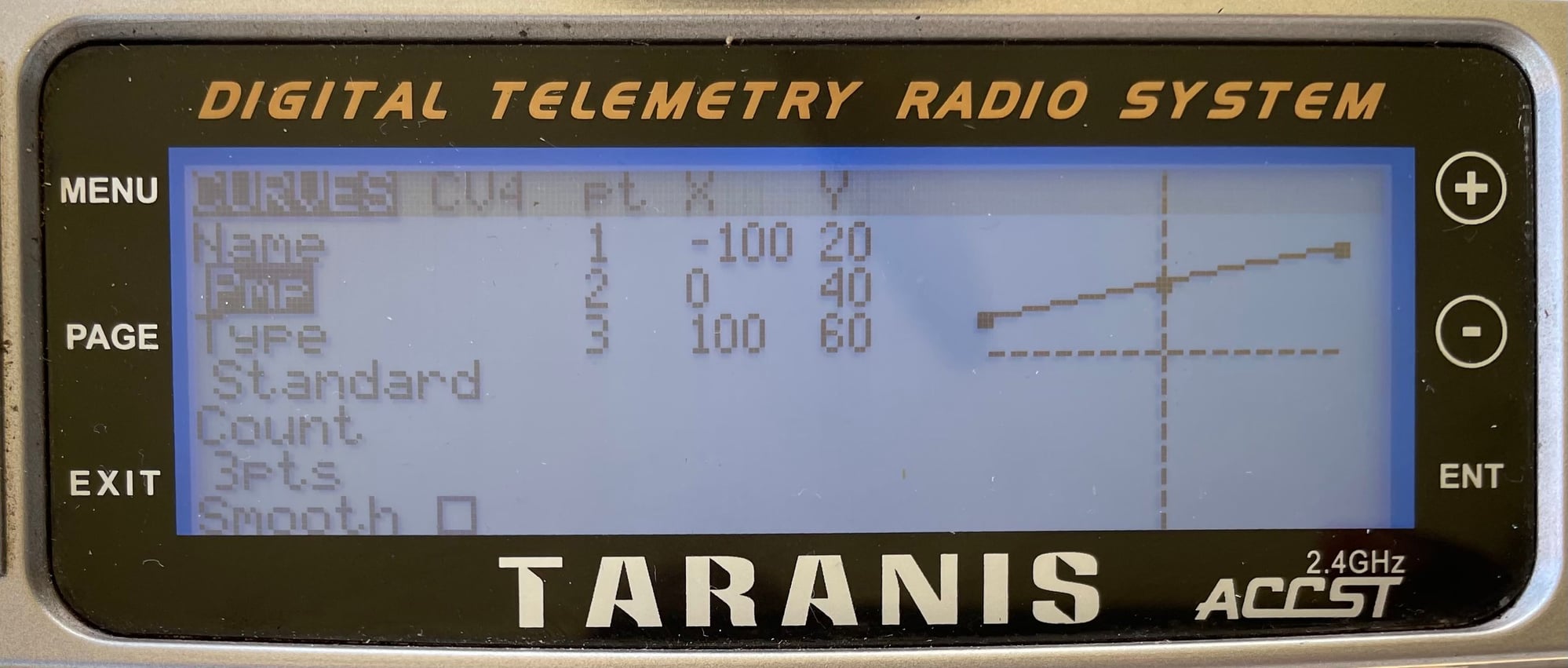
Thanks again
DaleD
08-06-2021, 05:42 AM
#330
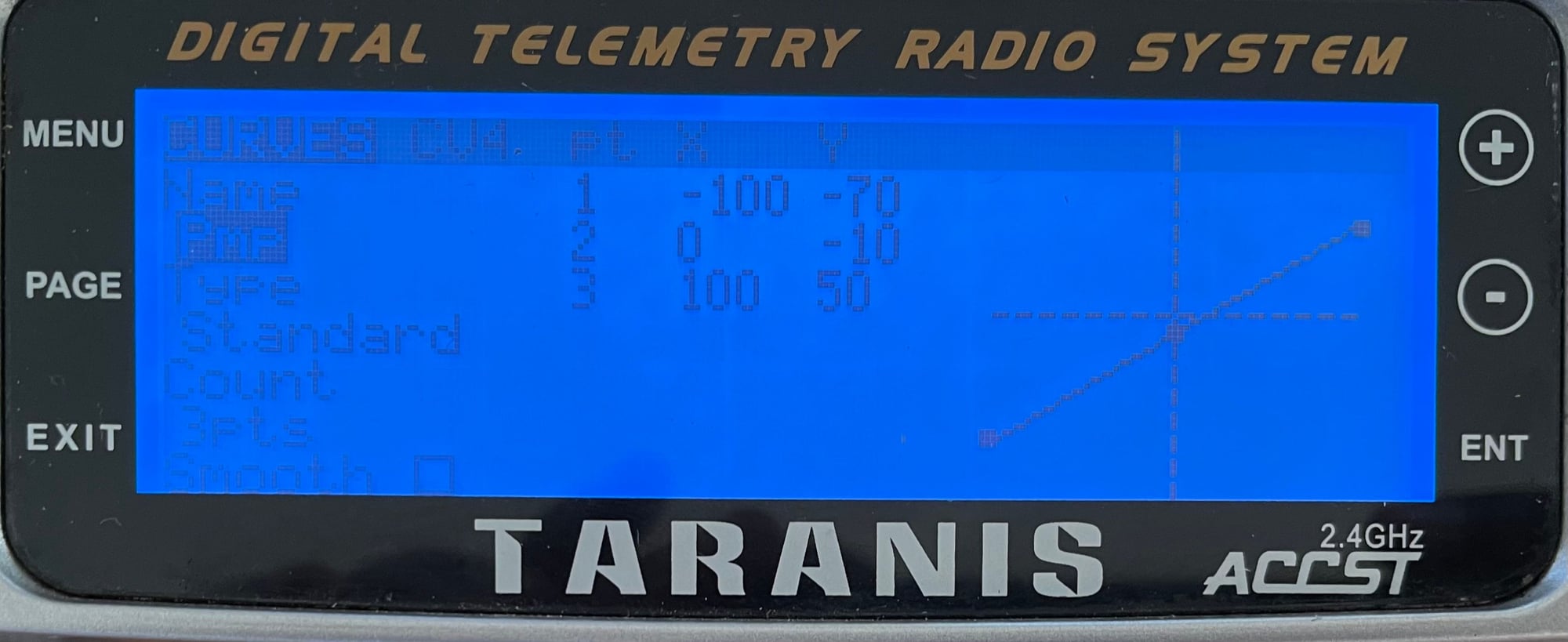
So, after making changes to the curve such that at -100 stick position the output is now 1602us and at 100 stick position the output is 1793us, the pump still doesn�t work.
I believe something else isn�t right. With the hope I can get further help figuring things out, I�m sharing a video of the actual mix. https://youtu.be/k2Yd3ihl8GE
Also, please see a picture of how the curve is set up below.
Thanks again
DaleD
I believe something else isn�t right. With the hope I can get further help figuring things out, I�m sharing a video of the actual mix. https://youtu.be/k2Yd3ihl8GE
Also, please see a picture of how the curve is set up below.
Thanks again
DaleD
Decided to go back to basics with the setting up the curve. Set everything input/output as follows -100/-100
0/0
100/100
It worked!!
Once the pump was working, I made adjustments to achieve desired operation; low flow at idle to approximately 50% flow at max throttle. Picture of final curve below.
Thanks again for ALL the help.
DaleD
08-07-2021, 09:04 AM
#331
Grateful for guidance on the options available to power the X8R receiver. I usually connect battery through switch to one of the 8 output channels. For this build I need all 8 output channels and don�t have a y-connector handy.
Is it OK to power the receiver through one of the other ports? If yes, which will work best?
Thanks
DaleD
Is it OK to power the receiver through one of the other ports? If yes, which will work best?
Thanks
DaleD
08-07-2021, 11:53 AM
#332
Grateful for guidance on the options available to power the X8R receiver. I usually connect battery through switch to one of the 8 output channels. For this build I need all 8 output channels and don�t have a y-connector handy.
Is it OK to power the receiver through one of the other ports? If yes, which will work best?
Thanks
DaleD
Is it OK to power the receiver through one of the other ports? If yes, which will work best?
Thanks
DaleD
Use a Y at the least. It will be fine for 8 "average" servo type loads. But if using many high torque servos you may be pushing it and getting "brownouts" in the air due to voltage drops. Note that the X8R isn't the best for rejection of RF noise from a gas engine, either. Frsky has other models that are made for that.
08-07-2021, 12:29 PM
#333
It may be possible, but I wouldn't, especially in a larger many servo plane. The main bus for power at the pins isn't all that robust to begin with (hence why the big boys use power distribution systems, no matter the brand). The other connectors are even smaller, so unable to handle the current demands a multi-channel setup would draw.
Use a Y at the least. It will be fine for 8 "average" servo type loads. But if using many high torque servos you may be pushing it and getting "brownouts" in the air due to voltage drops. Note that the X8R isn't the best for rejection of RF noise from a gas engine, either. Frsky has other models that are made for that.
Use a Y at the least. It will be fine for 8 "average" servo type loads. But if using many high torque servos you may be pushing it and getting "brownouts" in the air due to voltage drops. Note that the X8R isn't the best for rejection of RF noise from a gas engine, either. Frsky has other models that are made for that.
The model will have six servos(2 aileron, 2 elevator, 1 rudder and 1 throttle) each of 145oz/in torque(not really high torque by today�s standards). I will use y-connectors as you recommend.
Thanks again.
DaleD
08-20-2021, 02:01 PM
#334
Junior Member
Hi All,
I am new to the forum and want to get started with RC tanks (no previous RC experience). I have been researching the FrSky X9 Lite S as a possible radio to start with. Everything looks workable except the firmware flashing procedure. I have tried installing ZAdig on three of my computers and have not been able to attain success. Am I missing something? Is there another way to flash the radio firmware?
Many thanks -- Old Nate
I am new to the forum and want to get started with RC tanks (no previous RC experience). I have been researching the FrSky X9 Lite S as a possible radio to start with. Everything looks workable except the firmware flashing procedure. I have tried installing ZAdig on three of my computers and have not been able to attain success. Am I missing something? Is there another way to flash the radio firmware?
Many thanks -- Old Nate
08-20-2021, 06:45 PM
#335
Hi All,
I am new to the forum and want to get started with RC tanks (no previous RC experience). I have been researching the FrSky X9 Lite S as a possible radio to start with. Everything looks workable except the firmware flashing procedure. I have tried installing ZAdig on three of my computers and have not been able to attain success. Am I missing something? Is there another way to flash the radio firmware?
Many thanks -- Old Nate
I am new to the forum and want to get started with RC tanks (no previous RC experience). I have been researching the FrSky X9 Lite S as a possible radio to start with. Everything looks workable except the firmware flashing procedure. I have tried installing ZAdig on three of my computers and have not been able to attain success. Am I missing something? Is there another way to flash the radio firmware?
Many thanks -- Old Nate
In more current version, you can do it after installing Companion on your computer, or by copying the firmware to the "Firmware" folder on the radio, and then use the radio to install it.
08-21-2021, 05:08 AM
#336
Junior Member
I'm new to all of this! I have TXcompanion 2.3 on my computer. Thanks for the info on flashing firmware.
I'm currently 3D printing a speed-tank and it will be my first ever RC project.
Thanks again -- Old Nate
I'm currently 3D printing a speed-tank and it will be my first ever RC project.
Thanks again -- Old Nate
08-21-2021, 05:42 AM
#337
Go to your system menu, and page to the last page to see what version is currently on your radio.
Note that there are actually three separate programs installed:
1. The main OpenTX firmware, version found as noted above.
2. The "bootloader", noted on the screen that comes up when attaching to your computer. Nice to have it the same as #1, but not at all an issue if it is a little different.
3. The transmission protocol module - two versions, depending on the age of your receivers. If the system is new, nothing to pay attention to. Might rear its head if using less recently obtained receivers. (ie - they won't bind).
08-21-2021, 03:43 PM
#338
Hello again.
I have benefitted from the manual I bought from Aloft. Highly recommended for non computer person like me.
The manual is tailored to 2.3. while very helpful for my " legacy" version of 2.2.2. I see the benefits of 2.3 making sense if....
My new inquiry is this. If I am successful updating my "spare" radio (also on 2.2.2 ) to 2.3 , which I doubt success will be a result of....lolWill all of my 42 recievers (all x Series) and 10 devices ie sensors, require updating also?
I replaced the gimbals in this radio. My main unit became unavailable for a bit. When I bound a few of my planes to it. Trouble ensued. Normally good easy mounts became almost un flyable. Multiple recalibrations didn't yield better outcomes. My main radio came back on line and poof back to normal.
With the manual I am dangerously close to attempting an update. The idea of not having to open a fuse to bind a different mount between radios is intriguing.
The idea of re-buying or updating ALL of these recievers is not....
Thanks in advance folks.
I have benefitted from the manual I bought from Aloft. Highly recommended for non computer person like me.
The manual is tailored to 2.3. while very helpful for my " legacy" version of 2.2.2. I see the benefits of 2.3 making sense if....
My new inquiry is this. If I am successful updating my "spare" radio (also on 2.2.2 ) to 2.3 , which I doubt success will be a result of....lolWill all of my 42 recievers (all x Series) and 10 devices ie sensors, require updating also?
I replaced the gimbals in this radio. My main unit became unavailable for a bit. When I bound a few of my planes to it. Trouble ensued. Normally good easy mounts became almost un flyable. Multiple recalibrations didn't yield better outcomes. My main radio came back on line and poof back to normal.
With the manual I am dangerously close to attempting an update. The idea of not having to open a fuse to bind a different mount between radios is intriguing.
The idea of re-buying or updating ALL of these recievers is not....
Thanks in advance folks.
08-21-2021, 06:49 PM
#339
Well, with technology one should never say never...but updating OpenTX should normally not ever require rebinding.. I would, however, delete all telemetry sensors and re-discover them. This should not upset any other programming, screens, etc. you have that use the data from the sensors, although you would have to redo any custom or calculated sensors. They many times come through the upgrade just fine, but I have had some issues with them working on my color radio (an X10S-E) after an update. The delete and rediscover fixes it.
What may someday bite you is needing to update the protocol module in the radio. Around two years ago, a very rare bug was found that, in extreme interference conditions, could cause a servo in flight to go full stop in one direction or another, resulting in a crash. Many view it as so unlikely, they ignore the update. Others recommend that safe is safe, and it should be done.
You have to go to the Frsky site to download the update. One to install on your transmitter, and then each receiver has to be done with its own particular version, and rebound. New receivers may have either the old or the new, depending on how long they sat on a shelf at a distributor. No way to tell what is installed, except by finding that it just won't bind with the TX, no matter what you do.
If you dig a little deeper in the Frsky site, they do still have the "old" version available, so you can convert a receiver back if needed. At some point, I assume Frsky will cut off access to the old version, which would force everyone to go with the new if they want to add new receivers. But there has been no information about if or when this might happen.
If you update to any version 2.3 (2.3.14 recommended), the information screen in System will now report what version of the protocol is installed on the radio, so at least you will know that!
What may someday bite you is needing to update the protocol module in the radio. Around two years ago, a very rare bug was found that, in extreme interference conditions, could cause a servo in flight to go full stop in one direction or another, resulting in a crash. Many view it as so unlikely, they ignore the update. Others recommend that safe is safe, and it should be done.
You have to go to the Frsky site to download the update. One to install on your transmitter, and then each receiver has to be done with its own particular version, and rebound. New receivers may have either the old or the new, depending on how long they sat on a shelf at a distributor. No way to tell what is installed, except by finding that it just won't bind with the TX, no matter what you do.
If you dig a little deeper in the Frsky site, they do still have the "old" version available, so you can convert a receiver back if needed. At some point, I assume Frsky will cut off access to the old version, which would force everyone to go with the new if they want to add new receivers. But there has been no information about if or when this might happen.
If you update to any version 2.3 (2.3.14 recommended), the information screen in System will now report what version of the protocol is installed on the radio, so at least you will know that!
08-22-2021, 05:03 AM
#340
Well, with technology one should never say never...but updating OpenTX should normally not ever require rebinding.. I would, however, delete all telemetry sensors and re-discover them. This should not upset any other programming, screens, etc. you have that use the data from the sensors, although you would have to redo any custom or calculated sensors. They many times come through the upgrade just fine, but I have had some issues with them working on my color radio (an X10S-E) after an update. The delete and rediscover fixes it.
What may someday bite you is needing to update the protocol module in the radio. Around two years ago, a very rare bug was found that, in extreme interference conditions, could cause a servo in flight to go full stop in one direction or another, resulting in a crash. Many view it as so unlikely, they ignore the update. Others recommend that safe is safe, and it should be done.
I suspect this may have happened to me already. Have had a few crashes that would be explained exactly as a servo had locked in a full travel resulting in a uncontrollable crash that didn't go into failsafe and still had control of the model if the battery stayed connected after the plane hit the ground. We (myself and onlookers) felt it to be a servo failure upon in investigation.
You have to go to the Frsky site to download the update. One to install on your transmitter, and then each receiver has to be done with its own particular version, and rebound. New receivers may have either the old or the new, depending on how long they sat on a shelf at a distributor. No way to tell what is installed, except by finding that it just won't bind with the TX, no matter what you do.
Bingo!
If you dig a little deeper in the Frsky site, they do still have the "old" version available, so you can convert a receiver back if needed. At some point, I assume Frsky will cut off access to the old version, which would force everyone to go with the new if they want to add new receivers. But there has been no information about if or when this might happen.
If you update to any version 2.3 (2.3.14 recommended), the information screen in System will now report what version of the protocol is installed on the radio, so at least you will know that!
What may someday bite you is needing to update the protocol module in the radio. Around two years ago, a very rare bug was found that, in extreme interference conditions, could cause a servo in flight to go full stop in one direction or another, resulting in a crash. Many view it as so unlikely, they ignore the update. Others recommend that safe is safe, and it should be done.
I suspect this may have happened to me already. Have had a few crashes that would be explained exactly as a servo had locked in a full travel resulting in a uncontrollable crash that didn't go into failsafe and still had control of the model if the battery stayed connected after the plane hit the ground. We (myself and onlookers) felt it to be a servo failure upon in investigation.
You have to go to the Frsky site to download the update. One to install on your transmitter, and then each receiver has to be done with its own particular version, and rebound. New receivers may have either the old or the new, depending on how long they sat on a shelf at a distributor. No way to tell what is installed, except by finding that it just won't bind with the TX, no matter what you do.
Bingo!
If you dig a little deeper in the Frsky site, they do still have the "old" version available, so you can convert a receiver back if needed. At some point, I assume Frsky will cut off access to the old version, which would force everyone to go with the new if they want to add new receivers. But there has been no information about if or when this might happen.
If you update to any version 2.3 (2.3.14 recommended), the information screen in System will now report what version of the protocol is installed on the radio, so at least you will know that!
I am one of three people using Taranis radios at our field.
One is a quad user. He loves it. The other is a long time low level occasional flying used of fixed wing trainers. Like me, he does not use the true capacities of open tx.
He likes the radio for it's basic telemetry and we all three feel the radio link is superior to other flyers radios.
Sounds like I may have hit a wall with my last purchase of recievers from aloft. Six x series purchased. The first two I unpackaged and attempted to bind won't.
I suspected I would have to update them. Running 2.2.2, I expect I will have to go to at least the 2.3.14 you mention and then update the individual recievers to match that update? They all got put limbo after the first two wouldn't bind at the field. Everybody running other radios got a big kick out of watching me unpack two recievers and waste my field time till dark trying to make them bind.
Updating two radios and 50 +- devices both radios. A daunting task for me. Armed with the manual I have some hope. I am at my cabin this week with a high speed Internet connection and a USB cable with the laptop I have open tx on.
May try to brick my spare radio while I have the connection I don't have at home. Lol.
Aaron-
Last edited by Hyjinx; 08-22-2021 at 05:09 AM.
08-22-2021, 05:16 AM
#341
Just to be clear, OpenTX and the ACCESS protocol updates I talked about are completely separate things. You do not need to update one to do the other. I'd suspect you got ver 2 receivers from Aloft. You might want to explore how to downgrade them. You can do it using the pins inside the module bay on the TX, and the cables that came with the receiver.
 08-31-2021, 01:27 PM
08-31-2021, 01:27 PM
#343
09-16-2021, 04:51 AM
#344
Hi All I have a reoccurring error code while using the RB-10. I was able to catch it on a short video rather than trying to articulate in writing. The set up is running on my recently updated radio with 2.3.14. it also happened on my original radio running 2.2.2 Resulted in multiple servos being killed on the throttle channel only. Ruined HV and standard high torque digital servos. From nib.
I have had this condition on two different RB 10 units. Others have not displayed the same problem. I have five of them.https://photos.app.goo.gl/XQ8Kebfv7s4ZCnQv6
ThanksAaron-
I have had this condition on two different RB 10 units. Others have not displayed the same problem. I have five of them.https://photos.app.goo.gl/XQ8Kebfv7s4ZCnQv6
ThanksAaron-
09-16-2021, 01:50 PM
#345
Never even seen one of these. From your pictures, and looking at on-line info, it appears you are using 3S LiFe batteries, each run through a voltage regulator? Looks like the regulators aren't doing their job, or are hooked up wrong. Hence you are pumping 9.9v into a device that will only handle a max of 8.4 volts. And into servos designed for 7.4
So it is telling you what is wrong: "power overload" into the RB-10, and "servo overload" out to the servos.
Can happen when trying to fudge together something to save a few dollars instead of using the components it was designed for, such as 2S batteries. Hope you didn't also fry your receivers.
So it is telling you what is wrong: "power overload" into the RB-10, and "servo overload" out to the servos.
Can happen when trying to fudge together something to save a few dollars instead of using the components it was designed for, such as 2S batteries. Hope you didn't also fry your receivers.
09-17-2021, 04:39 AM
#346
Never even seen one of these. From your pictures, and looking at on-line info, it appears you are using 3S LiFe batteries, each run through a voltage regulator? Looks like the regulators aren't doing their job, or are hooked up wrong. Hence you are pumping 9.9v into a device that will only handle a max of 8.4 volts. And into servos designed for 7.4
So it is telling you what is wrong: "power overload" into the RB-10, and "servo overload" out to the servos.
Can happen when trying to fudge together something to save a few dollars instead of using the components it was designed for, such as 2S batteries. Hope you didn't also fry your receivers.
So it is telling you what is wrong: "power overload" into the RB-10, and "servo overload" out to the servos.
Can happen when trying to fudge together something to save a few dollars instead of using the components it was designed for, such as 2S batteries. Hope you didn't also fry your receivers.
Clarification
The RB 10 thru 40 are Frisky proprietary devices that are designed to provide redundant battery power and circuit breaker protection to your servos. They provide individual inputs for two separate batteries and the claim is the manual indicates the unit operates on the highest voltage battery until a failure/discharge causes it to switch to use the redundant battery.
If a servo were to fail and increase the load to a individual channel the unit drops it out to prevent catastrophic failure due to immediate voltage drain from the potential overload of that circuit. But keeps the bus active beyond the failure.
It is usually run through a dual reciever set up to also provide signal redundancy. And is a s port hub for add on sensors. A cool add on to my more valuable planes.
In operation, it can only provide line voltage at the pins depending on your batteries capability. To my knowledge and nowhere in it's manual does it claim to series the batteries to double the voltage and it is not a step up transformer.
Voltage measured at the pins is always the same as one of the two batteries. It can be run to 9 volts like the recievers if desired. But that would be sort of overkill as HV servos shouldn't be run anywhere near that obviously.
Expand the pic to note the two batteries are 2 S 3300 Mah LiFe. 7.2 v that settles at the nominal 6.6 during most of the charges cycle.
They are both run through two working regulators set to 6.5 volts ( reduces the mood swings as they discharge)
The warnings are not erroneous. Evidenced by the destruction of more than one Hitek HV high torque servos. Always killed the throttle channel at the field in preflight checks. Happened twice the same day.
I own and use 6 of them. I also have more than 3 of the RB 20 units in operation on LiFe's and Lipo's.
Two RB 10:s of six I own do this. The other four do not.
You have turned a light on here I had not considered.
I am reasoning the unit is defective. The defect is doubling the voltage and the first servo on the busline is taking the hit, (throttle) instantly killing it and sending the error to the radio.
It is long past warranty, but I should probably pass this on to Wayne at aloft to verify my theory for others who may have experienced similar findings..
But I expect he ghost monitors this thread occupationally 🙂
Aloft also offers a forum format for the Frisky products.
It like this is quite helpful.
Sorry to be wordy. I do appreciate your thoughts and tips. My spare radio is running ok on 2.3.14 as far as tested yet😃
My first update through companion. Went smooth and trouble free. I must rebind recievers as mentioned, but older recievers bind without updating. So far anyway.
Doubt they have the advanced features of 2.3.14.
But I don't know how to use the upgrades yet.
Thanks
Aaron-
09-18-2021, 03:20 PM
#347
I was guessing on the cell count of the batteries - tried to zoom in close on the picture, but the check boxes on them are not checked, so I attempted to count the bulges in the packs as cells. Should have counted the wires for the balance ports.
A volt meter would sort this out really quickly. Verify what is going in to each battery connection, and the polarity. Then verify what is coming out to any of the + and - pins on the servo connectors.
Just for testing, try it without the voltage regulators, one battery at a time, and then with both.
BTW - while 2S LiFe are a little more voltage than many servos are rated for, but only a little. Back in the olden days many ran 5 cell NiCad packs for increased speed and torque. Nominal voltage was 6, but hot off the charger could be as high as 7 - for a while. Ran on the servos of the day with no issues.
I use nothing but 2S LiFe in all my planes - whether with "good" servos, or ones from my "junk" box left over from the 90's. Don't own any "HV" servos. Never an issue with burning one out.
Of course, if you want to be cautious, by all means include the regulators. For your testing, it is always good to simplify the system as much as possible, to narrow down what may be causing the issue.
A volt meter would sort this out really quickly. Verify what is going in to each battery connection, and the polarity. Then verify what is coming out to any of the + and - pins on the servo connectors.
Just for testing, try it without the voltage regulators, one battery at a time, and then with both.
BTW - while 2S LiFe are a little more voltage than many servos are rated for, but only a little. Back in the olden days many ran 5 cell NiCad packs for increased speed and torque. Nominal voltage was 6, but hot off the charger could be as high as 7 - for a while. Ran on the servos of the day with no issues.
I use nothing but 2S LiFe in all my planes - whether with "good" servos, or ones from my "junk" box left over from the 90's. Don't own any "HV" servos. Never an issue with burning one out.
Of course, if you want to be cautious, by all means include the regulators. For your testing, it is always good to simplify the system as much as possible, to narrow down what may be causing the issue.
09-20-2021, 05:19 AM
#348
I was guessing on the cell count of the batteries - tried to zoom in close on the picture, but the check boxes on them are not checked, so I attempted to count the bulges in the packs as cells. Should have counted the wires for the balance ports.
A volt meter would sort this out really quickly. Verify what is going in to each battery connection, and the polarity. Then verify what is coming out to any of the + and - pins on the servo connectors.
Just for testing, try it without the voltage regulators, one battery at a time, and then with both.
BTW - while 2S LiFe are a little more voltage than many servos are rated for, but only a little. Back in the olden days many ran 5 cell NiCad packs for increased speed and torque. Nominal voltage was 6, but hot off the charger could be as high as 7 - for a while. Ran on the servos of the day with no issues.
I use nothing but 2S LiFe in all my planes - whether with "good" servos, or ones from my "junk" box left over from the 90's. Don't own any "HV" servos. Never an issue with burning one out.
Of course, if you want to be cautious, by all means include the regulators. For your testing, it is always good to simplify the system as much as possible, to narrow down what may be causing the issue.
A volt meter would sort this out really quickly. Verify what is going in to each battery connection, and the polarity. Then verify what is coming out to any of the + and - pins on the servo connectors.
Just for testing, try it without the voltage regulators, one battery at a time, and then with both.
BTW - while 2S LiFe are a little more voltage than many servos are rated for, but only a little. Back in the olden days many ran 5 cell NiCad packs for increased speed and torque. Nominal voltage was 6, but hot off the charger could be as high as 7 - for a while. Ran on the servos of the day with no issues.
I use nothing but 2S LiFe in all my planes - whether with "good" servos, or ones from my "junk" box left over from the 90's. Don't own any "HV" servos. Never an issue with burning one out.
Of course, if you want to be cautious, by all means include the regulators. For your testing, it is always good to simplify the system as much as possible, to narrow down what may be causing the issue.
Most setups now are redundant recievers on two Life batteries thru individual switches. The addition of the Frisky redundant buss' units usually go on my high end planes.
Ran an acid test on this set up this morning
With a voltmeter on the chanel one pins, the VM registers the battery voltage and no more energized. Two batteries and then one battery makes no difference (as it should not). The radio is still giving intermittent error warnings even though the pin output is not changing and is not excessive.
I guess I have found a mystery of electronics.
The condition must be caused by the RB 10 s internal circuitry.
I can't get the site to accept any attachments of photo or video today to verify.
But that's not unusual either. 😂
09-20-2021, 06:05 AM
#349
All pretty much my findings too Ted. I use about every set up you can name for different applications from simple hv /lipo non regulated to 3s lipos on regulators for super reserve power on everyday nitro planes to five cell nicad and Mah on low end futaba and hiteks removed from 40 year old wrecks. ( Five gallon buckets of each brand lol.
Most setups now are redundant recievers on two Life batteries thru individual switches. The addition of the Frisky redundant buss' units usually go on my high end planes.
Ran an acid test on this set up this morning
With a voltmeter on the chanel one pins, the VM registers the battery voltage and no more energized. Two batteries and then one battery makes no difference (as it should not). The radio is still giving intermittent error warnings even though the pin output is not changing and is not excessive.
I guess I have found a mystery of electronics.
The condition must be caused by the RB 10 s internal circuitry.
I can't get the site to accept any attachments of photo or video today to verify.
But that's not unusual either. 😂
Most setups now are redundant recievers on two Life batteries thru individual switches. The addition of the Frisky redundant buss' units usually go on my high end planes.
Ran an acid test on this set up this morning
With a voltmeter on the chanel one pins, the VM registers the battery voltage and no more energized. Two batteries and then one battery makes no difference (as it should not). The radio is still giving intermittent error warnings even though the pin output is not changing and is not excessive.
I guess I have found a mystery of electronics.
The condition must be caused by the RB 10 s internal circuitry.
I can't get the site to accept any attachments of photo or video today to verify.
But that's not unusual either. 😂
09-20-2021, 02:26 PM
#350
As for the prompts, I'd suspect an error in the telemetry setup in the TX. There may need to be a divider or an offset entered to calibrate the volts detected.
You might want to look through this thread, starting at post 458, for what others have reported about the incorrect prompts. https://www.rcgroups.com/forums/show...B-10%29/page31
Last edited by tedsander; 09-20-2021 at 02:44 PM.