Hi all,
I'm putting together a Seagull Decathlon which uses dual elevator servos. My issue is that the two elevator halves don't move together, one is always slightly quicker at getting to the end point.
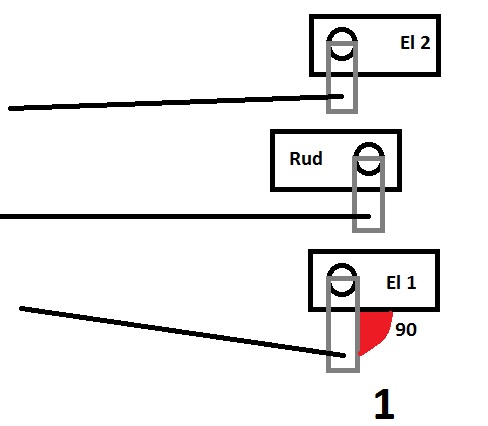
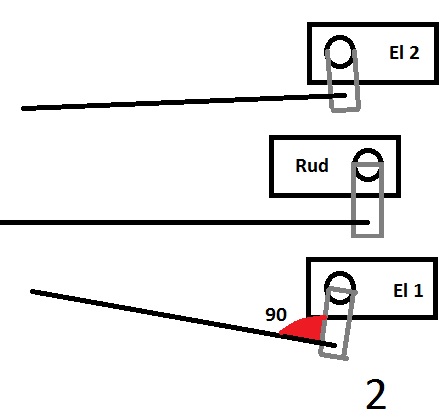
I've reset sub trims to 0 and read about the servo arm needing to be 90 degrees BUT is that to the servo or the rod?
The two push rods aren't at the exact same angle going from the servos to the back of the plane which confuses things.
I'm using channels 2 and 5 (from memory, I'm at work) with the ailevator setting on my Futaba transmitter with a R617FS receiver.
Please see below and let me know which (if any) is correct at neutral.
Many thanks for your help!
Chris