


Dual Elevator Setup..Help!
 02-11-2016 | 01:54 AM
02-11-2016 | 01:54 AM
#1
Thread Starter
Junior Member
Joined: Feb 2016
Posts: 12
Likes: 0
Received 0 Likes
on
0 Posts
Hi all,
I'm putting together a Seagull Decathlon which uses dual elevator servos. My issue is that the two elevator halves don't move together, one is always slightly quicker at getting to the end point.
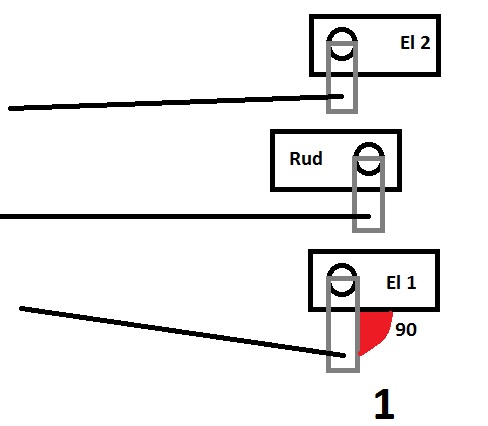
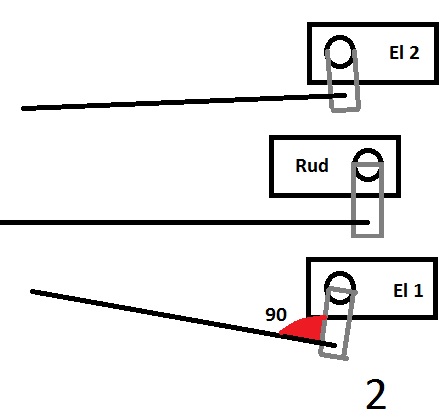
I've reset sub trims to 0 and read about the servo arm needing to be 90 degrees BUT is that to the servo or the rod?
The two push rods aren't at the exact same angle going from the servos to the back of the plane which confuses things.
I'm using channels 2 and 5 (from memory, I'm at work) with the ailevator setting on my Futaba transmitter with a R617FS receiver.
Please see below and let me know which (if any) is correct at neutral.
Many thanks for your help!
Chris
I'm putting together a Seagull Decathlon which uses dual elevator servos. My issue is that the two elevator halves don't move together, one is always slightly quicker at getting to the end point.
I've reset sub trims to 0 and read about the servo arm needing to be 90 degrees BUT is that to the servo or the rod?
The two push rods aren't at the exact same angle going from the servos to the back of the plane which confuses things.
I'm using channels 2 and 5 (from memory, I'm at work) with the ailevator setting on my Futaba transmitter with a R617FS receiver.
Please see below and let me know which (if any) is correct at neutral.
Many thanks for your help!
Chris
Last edited by swannyuk88; 02-11-2016 at 02:00 AM.

 02-11-2016 | 03:05 AM
02-11-2016 | 03:05 AM
#3
Thread Starter
Junior Member
Joined: Feb 2016
Posts: 12
Likes: 0
Received 0 Likes
on
0 Posts
I can't change the pushrod angles as its an ARTF and the guide tubes are already in.
Just a thought, I haven't set any specific end points yet, they are still at 100 % so there is a lot of throw. The two elevator surfaces seem to go out of alignment towards the top of the movement so maybe with correct (smaller) throws it won't be as bad.
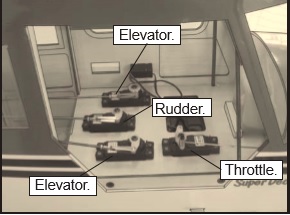
For reference here is a picture from the manual. Notice how the Elevator servo rods are at different angles, top one being more in line with the servo.
Just a thought, I haven't set any specific end points yet, they are still at 100 % so there is a lot of throw. The two elevator surfaces seem to go out of alignment towards the top of the movement so maybe with correct (smaller) throws it won't be as bad.
For reference here is a picture from the manual. Notice how the Elevator servo rods are at different angles, top one being more in line with the servo.
Last edited by swannyuk88; 02-11-2016 at 03:23 AM.
02-11-2016 | 03:45 AM
#4


My Feedback: (10)
Joined: Sep 2004
Posts: 2,602
Likes: 0
Received 0 Likes
on
0 Posts
From: Displaced Canadian in Central Texas TX
Change the Control arm on the one Elevator Servo so they are both arms pointing towards the center of the fuselage, I believe the angles would be the same or close to it and providing the pushrod tube lines up, then reverse the direction on the servo that you just changed the arm on
02-11-2016 | 03:55 AM
#5
Thread Starter
Junior Member
Joined: Feb 2016
Posts: 12
Likes: 0
Received 0 Likes
on
0 Posts
Change the Control arm on the one Elevator Servo so they are both arms pointing towards the center of the fuselage, I believe the angles would be the same or close to it and providing the pushrod tube lines up, then reverse the direction on the servo that you just changed the arm on
02-11-2016 | 12:36 PM
#7


My Feedback: (29)
Usually the ATV on each channel has to be set for equal throw at the surface. An example would be that your elevator ATV may have to be reduced to 75% because the master channel always seems to have more throw then the slaved channel. I would by using sub trims make the servo arms 90 degrees to the pushrods. Then adjust mechanically so that both elevator halves are in the center position. Make sure servo arms and control horns are all equal length. Next set the elevator ATV so that you have the throw you want both up and down. The percentages for up and down will not be the same if you are adjusting for equal deflection, they will always be slightly different. Now do the same for the slaved channel with the ATV until the two halves have the same travel. Don't worry too much about what the numbers are as long as you get the same travel. You can fine tune the travel and expo for both channels through elevator Dual Rate.
02-11-2016 | 01:41 PM
#8

Senior Member
My Feedback: (6)
Joined: Mar 2002
Posts: 1,237
Likes: 0
Received 0 Likes
on
0 Posts
From: New London,
OH
I just set up a seagull skybolt with a similar setup. I have both of my servo horns pointing to the same side (towards the fuselage in my case) to allow for the straightest line for the pushrods. I think you need to change the horns to be on the same side of the servo as mentioned above either on the inside or outside. You will need to reverse one servo so they go in the same direction.
02-11-2016 | 01:43 PM
#9

My Feedback: (6)
Without seeing any other pictures/video, I would have to suggest that a combination of travel limiting and arm-to-linkage angle would be your best solution.
1. make the angle of arm-to-linkage as close to 90 degrees as possible on both servos. Seems like the "upper one" is no issue. Just change the "lower one" so the link and the arm at a 90 degrees to each other regardless of the angle of the arm to the servo body. Of curse this is at neutral servo and neutral elevator position.
2. adjust your servo travel until you reach equal travel on both elevator halves. Using a current meter in this step is vary valuable to reach the limits of elevator travel without binding the servos. A spike in current at the extremes of throw will indicate a binding problem.
Hope that helps
Rafael
1. make the angle of arm-to-linkage as close to 90 degrees as possible on both servos. Seems like the "upper one" is no issue. Just change the "lower one" so the link and the arm at a 90 degrees to each other regardless of the angle of the arm to the servo body. Of curse this is at neutral servo and neutral elevator position.
2. adjust your servo travel until you reach equal travel on both elevator halves. Using a current meter in this step is vary valuable to reach the limits of elevator travel without binding the servos. A spike in current at the extremes of throw will indicate a binding problem.
Hope that helps
Rafael
02-11-2016 | 06:56 PM
#11
I did not see this asked and it may not be the problem but.
are your control rods put into the same hole from the center of the servo?
I would like to add, check the rods at the tail also, they need to be in the same hole on the horns.
are your control rods put into the same hole from the center of the servo?
I would like to add, check the rods at the tail also, they need to be in the same hole on the horns.
Last edited by Stick 40; 02-11-2016 at 07:07 PM. Reason: add info
02-12-2016 | 12:56 AM
#12
Thread Starter
Junior Member
Joined: Feb 2016
Posts: 12
Likes: 0
Received 0 Likes
on
0 Posts
Thanks for the replies all. I've got 3 hitec servos (all the same model) and swapped them around to rule out a slower servo.
Rods are at 90 degrees or as close as I can get to the servo arms and both rods are attached in the same end hole on the arms. The rods are the same length and I've made sure all mixes, trims subtrim etc are off or 0.
I looked in to moving one servo arm to the other side but in both cases that would cause a bend on the rod with quite a bit of pressure.
Here comes the interesting bit, with a y lead and throws set to 50% both surfaces move together and stop at the same point. Using Ailevator on channels 2 and 5, again with throws reduced one moves slightly quicker than the other.
In BOTH cases if I move the stick very slightly down one servo will move (talking 1 or 2mm) and the other wont until I move the stick a bit further. This happens on any of the 3 servos I put in the same place, could it be that one elevator / push rod is giving more resistance than the other? Can't feel it if it is.
Rods are at 90 degrees or as close as I can get to the servo arms and both rods are attached in the same end hole on the arms. The rods are the same length and I've made sure all mixes, trims subtrim etc are off or 0.
I looked in to moving one servo arm to the other side but in both cases that would cause a bend on the rod with quite a bit of pressure.
Here comes the interesting bit, with a y lead and throws set to 50% both surfaces move together and stop at the same point. Using Ailevator on channels 2 and 5, again with throws reduced one moves slightly quicker than the other.
In BOTH cases if I move the stick very slightly down one servo will move (talking 1 or 2mm) and the other wont until I move the stick a bit further. This happens on any of the 3 servos I put in the same place, could it be that one elevator / push rod is giving more resistance than the other? Can't feel it if it is.
Last edited by swannyuk88; 02-12-2016 at 12:59 AM.
02-12-2016 | 06:35 AM
#13
Senior Member
My Feedback: (6)
Joined: Mar 2002
Posts: 1,237
Likes: 0
Received 0 Likes
on
0 Posts
From: New London,
OH
In my Seagull skybolt, the pushrods cross each other. In other words the left pushrod exits the right side of the fuse and the right pusrhrod exits the left side of the fuse. This makes for straight pushrods to the servos with the horns going in the same direction. Mine are mixed on channels 2 and six. Make sure the mix for your channel 5 is set to 100 per cent and you should be able to adjust the endpoints to make the throws match.
02-12-2016 | 03:19 PM
#14
My Feedback: (6)
Thanks for the replies all. I've got 3 hitec servos (all the same model) and swapped them around to rule out a slower servo.
Rods are at 90 degrees or as close as I can get to the servo arms and both rods are attached in the same end hole on the arms. The rods are the same length and I've made sure all mixes, trims subtrim etc are off or 0.
I looked in to moving one servo arm to the other side but in both cases that would cause a bend on the rod with quite a bit of pressure.
Here comes the interesting bit, with a y lead and throws set to 50% both surfaces move together and stop at the same point. Using Ailevator on channels 2 and 5, again with throws reduced one moves slightly quicker than the other.
In BOTH cases if I move the stick very slightly down one servo will move (talking 1 or 2mm) and the other wont until I move the stick a bit further. This happens on any of the 3 servos I put in the same place, could it be that one elevator / push rod is giving more resistance than the other? Can't feel it if it is.
Rods are at 90 degrees or as close as I can get to the servo arms and both rods are attached in the same end hole on the arms. The rods are the same length and I've made sure all mixes, trims subtrim etc are off or 0.
I looked in to moving one servo arm to the other side but in both cases that would cause a bend on the rod with quite a bit of pressure.
Here comes the interesting bit, with a y lead and throws set to 50% both surfaces move together and stop at the same point. Using Ailevator on channels 2 and 5, again with throws reduced one moves slightly quicker than the other.
In BOTH cases if I move the stick very slightly down one servo will move (talking 1 or 2mm) and the other wont until I move the stick a bit further. This happens on any of the 3 servos I put in the same place, could it be that one elevator / push rod is giving more resistance than the other? Can't feel it if it is.
Hope that helps.
Rafael
02-12-2016 | 07:11 PM
#15

Joined: Jun 2002
Posts: 43
Likes: 0
Received 0 Likes
on
0 Posts
From: Brandon, MS
Here's another option. If you have one servo reversed on your transmitter it will be a little different from the other. Set your transmitter both to standard and use an inline servo reverser. t
This will drastically reduce the problem but you may still notice a little difference. However it should not be noticeable when you are flying because you don't operate your sticks the same way when sitting as opposed to when you are flying..
This will drastically reduce the problem but you may still notice a little difference. However it should not be noticeable when you are flying because you don't operate your sticks the same way when sitting as opposed to when you are flying..
02-12-2016 | 08:31 PM
#16

To start, pic 2 is right. This is simply the rule of rights. Each surface is a simple 4 bar linkage. All corresponding bars need to be equal in length. The biggest problem is that each component has 10% variance allowed in their parts. So the same servo model number will vary a bit anyway.
is about what all the guys are using. To dial in a plane takes lots of effort. So take your time and do it right.
is about what all the guys are using. To dial in a plane takes lots of effort. So take your time and do it right.
02-15-2016 | 02:38 AM
#17
Thread Starter
Junior Member
Joined: Feb 2016
Posts: 12
Likes: 0
Received 0 Likes
on
0 Posts
All sorted.
Used two servos that were closest in "sensitivity" and I wasn't setting the end points back to 0 after trying a single channel and Y cable. When I then went to use the Ailevator option on 2 channels the endpoints were conflicting. Would have thought it would bypass the first endpoints when you switch to Ailevator...
Used two servos that were closest in "sensitivity" and I wasn't setting the end points back to 0 after trying a single channel and Y cable. When I then went to use the Ailevator option on 2 channels the endpoints were conflicting. Would have thought it would bypass the first endpoints when you switch to Ailevator...


