


Jeti DS-24
 02-17-2021 | 07:05 AM
02-17-2021 | 07:05 AM
#1926

jvaliensi,
I feel your pain. I'm done with the CB400 also.
My Buccaneer scratch-build first flight loss has pointed a finger towards the CB400 as being partially responsible. Just like the CB200 and CB220, the CB400 has poly-fuses on each servo output and a number of people have contacted me about a history of crashes being attributed to the poly-fuse tripping and shutting down a critical servo. While the CB400 is rated for 30A continuous, each poly-fuse is only rated for 4-5A. The suspicion on the Buccaneer is that the elevator servo current draw caused the poly-fuse to blow.
Just Google 'CB400 poly fuse crash' and see what you find, especially on Flying Giants.
For my next build of the Buccaneer, I plan on using 2 CB210 boxes that don't use the poly-fuses. Distributing the 2 CB210's will also save on wiring.
Paul
I feel your pain. I'm done with the CB400 also.
My Buccaneer scratch-build first flight loss has pointed a finger towards the CB400 as being partially responsible. Just like the CB200 and CB220, the CB400 has poly-fuses on each servo output and a number of people have contacted me about a history of crashes being attributed to the poly-fuse tripping and shutting down a critical servo. While the CB400 is rated for 30A continuous, each poly-fuse is only rated for 4-5A. The suspicion on the Buccaneer is that the elevator servo current draw caused the poly-fuse to blow.
Just Google 'CB400 poly fuse crash' and see what you find, especially on Flying Giants.
For my next build of the Buccaneer, I plan on using 2 CB210 boxes that don't use the poly-fuses. Distributing the 2 CB210's will also save on wiring.
Paul
i use servos that pull over 35 kg each and they stall at 4 amps..
so a servo that pulls more looks to me a pretty crappy servo...
anyway its always good to blame the equipment , and not the user...
 02-17-2021 | 07:10 AM
02-17-2021 | 07:10 AM
#1927


My Feedback: (2)
I only said it was PARTLY responsible, but in retrospect, why would you put a fuse on a primary flight control - if it trips you guarantee loss of control.
See the current draw profile from telemetry below;
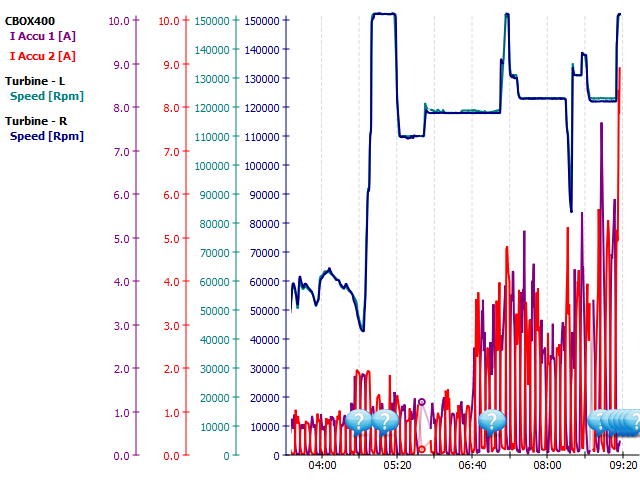
Nearly 9A just before impact, while most of the flight it was 1-3A. Full flaps and the deflection of the unique tailplane flap configuration likely caused an increased elevator servo draw (MKS 777A) and the inability to pull out of a steepeningdive just ma
See the current draw profile from telemetry below;
Nearly 9A just before impact, while most of the flight it was 1-3A. Full flaps and the deflection of the unique tailplane flap configuration likely caused an increased elevator servo draw (MKS 777A) and the inability to pull out of a steepeningdive just ma
02-17-2021 | 07:25 AM
#1928
My Feedback: (2)
I've never had a problem with either CB200 or CB400 up until now. No issues with the CB400 in my Hawker Hunter.
I only said it was PARTLY responsible, but in retrospect, why would you put a fuse on a primary flight control - if it trips you guarantee loss of control.
See the current draw profile from telemetry below;
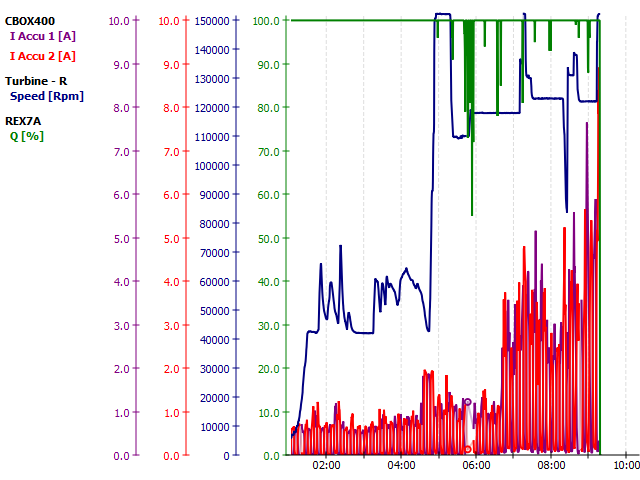
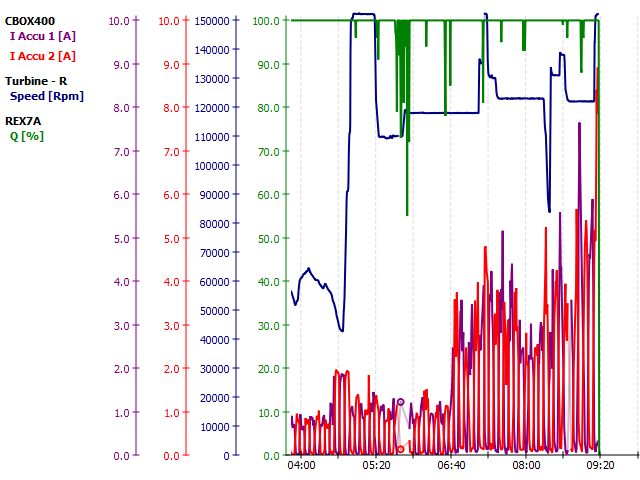
The servo torque was well in excess of design guidelines for the surface.
Nearly 9A just before impact, while most of the flight it was 1-3A. Full flaps and the deflection of the unique tailplane flap configuration likely caused an increased elevator servo draw (MKS 777A+ - 500oz.in/ 36kg.cm) and the inability to pull out of a steepening dive just made it worse.
Going to use a MKS X8 HBL3850 servo with over 700oz.in (50kg.cm) on the elevator for next build also.
Paul
I only said it was PARTLY responsible, but in retrospect, why would you put a fuse on a primary flight control - if it trips you guarantee loss of control.
See the current draw profile from telemetry below;
The servo torque was well in excess of design guidelines for the surface.
Nearly 9A just before impact, while most of the flight it was 1-3A. Full flaps and the deflection of the unique tailplane flap configuration likely caused an increased elevator servo draw (MKS 777A+ - 500oz.in/ 36kg.cm) and the inability to pull out of a steepening dive just made it worse.
Going to use a MKS X8 HBL3850 servo with over 700oz.in (50kg.cm) on the elevator for next build also.
Paul
 02-17-2021 | 07:46 AM
02-17-2021 | 07:46 AM
#1931
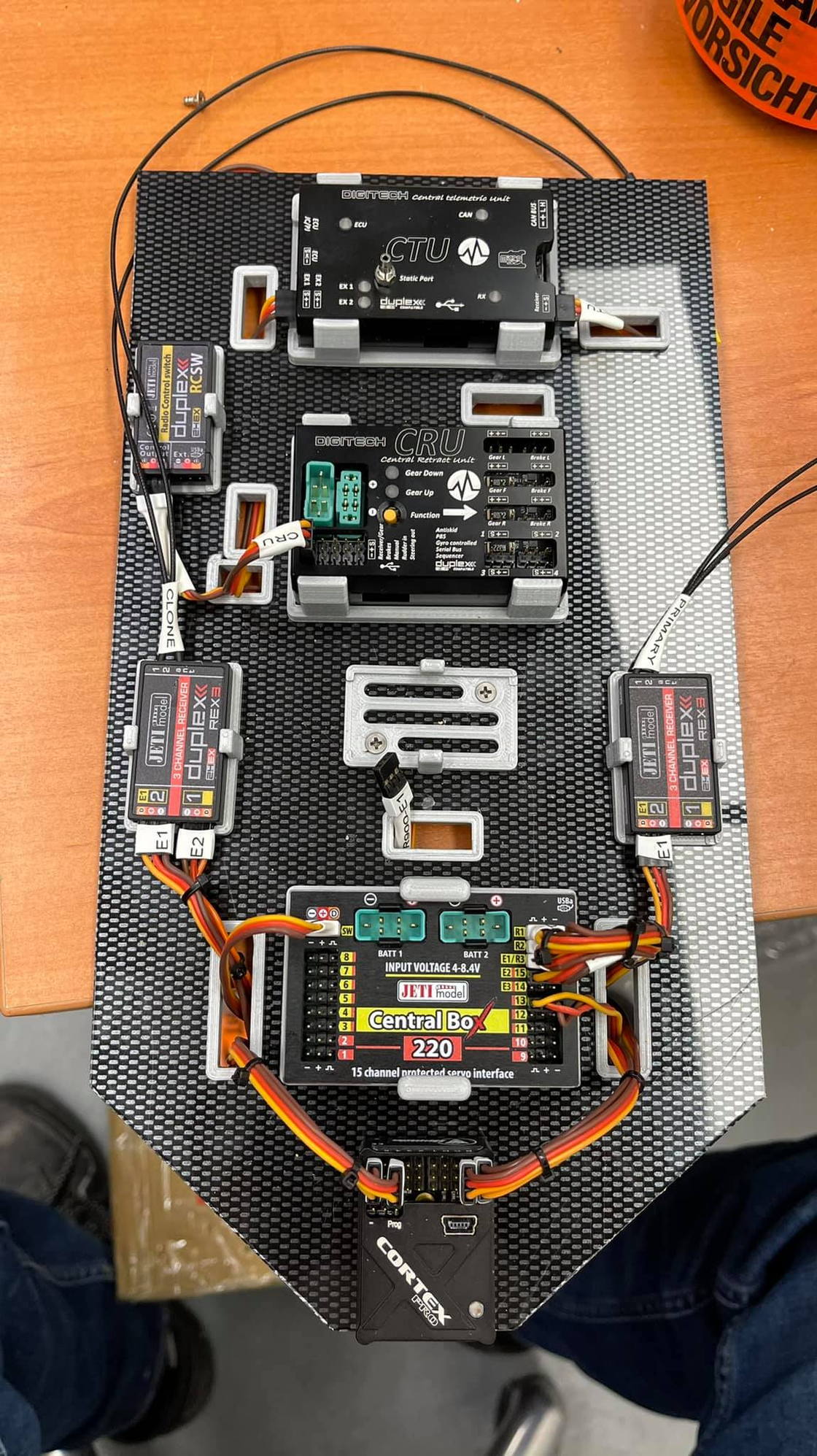
channel 5 of the BD is not used since i dont use mixing there..
the CB is the same as the 220 as it comes to port power..
on channel 4 on the BD you can see the cable that goes to channel 13 of the cb
the CTU and CRU are conected together onto channel 15 of the CB (e1)
02-17-2021 | 07:52 AM
#1932
Senior Member
02-17-2021 | 08:02 AM
#1934
Senior Member
It is commen to your car, in real airplanes, in your house etc.
If your system trips during normal ops use, then there is fundamentally something wrong.
I had a elevator servo lead shortened on my Ultra Lightning 10 years ago. This was because my thrustpipe ruptured open en melted the isolation of the servo wire. Luckily my Powerbox prevented a crash due to the fuse.
Last edited by Didier; 02-17-2021 at 08:06 AM.
02-17-2021 | 08:49 AM
#1935
My Feedback: (2)
One key difference from a house/ car is that we can't pull over and stop to sort it out...........
We have so many single point failure cases in every one of our models we can't protect them from all scenarios.
We have dual batteries and dual Rx's that help, but in most cases we don't have dual independent servo's and linkages on every critical surface. If we do (giant scale 3D is probably the most prevalent use of multi-servo surfaces), they are rarely truly independent and are mainly for torque requirements and stability on long/ flexible surfaces, rather than for flight critical redundancy.
Setting up dual servos that don't fight each other is complicated and just having 2 servos on a surface with perfect servo matching doesn't protect from a jammed servo - see recent CARF Hawk thread for a way to decouple the servos to offer some protection.
Flying our models, especially unproven scratch-built projects is a balance of risk. Having been bitten I know how I'm revising my next build, and that is to avoid poly-fuses. Once the design is proven with actual current draw data across the full envelope I may change my mind.
Paul
We have so many single point failure cases in every one of our models we can't protect them from all scenarios.
We have dual batteries and dual Rx's that help, but in most cases we don't have dual independent servo's and linkages on every critical surface. If we do (giant scale 3D is probably the most prevalent use of multi-servo surfaces), they are rarely truly independent and are mainly for torque requirements and stability on long/ flexible surfaces, rather than for flight critical redundancy.
Setting up dual servos that don't fight each other is complicated and just having 2 servos on a surface with perfect servo matching doesn't protect from a jammed servo - see recent CARF Hawk thread for a way to decouple the servos to offer some protection.
Flying our models, especially unproven scratch-built projects is a balance of risk. Having been bitten I know how I'm revising my next build, and that is to avoid poly-fuses. Once the design is proven with actual current draw data across the full envelope I may change my mind.
Paul
02-17-2021 | 09:56 AM
#1936
02-17-2021 | 11:57 PM
#1940
One key difference from a house/ car is that we can't pull over and stop to sort it out...........
We have so many single point failure cases in every one of our models we can't protect them from all scenarios.
We have dual batteries and dual Rx's that help, but in most cases we don't have dual independent servo's and linkages on every critical surface. If we do (giant scale 3D is probably the most prevalent use of multi-servo surfaces), they are rarely truly independent and are mainly for torque requirements and stability on long/ flexible surfaces, rather than for flight critical redundancy.
Setting up dual servos that don't fight each other is complicated and just having 2 servos on a surface with perfect servo matching doesn't protect from a jammed servo - see recent CARF Hawk thread for a way to decouple the servos to offer some protection.
Flying our models, especially unproven scratch-built projects is a balance of risk. Having been bitten I know how I'm revising my next build, and that is to avoid poly-fuses. Once the design is proven with actual current draw data across the full envelope I may change my mind.
Paul
We have so many single point failure cases in every one of our models we can't protect them from all scenarios.
We have dual batteries and dual Rx's that help, but in most cases we don't have dual independent servo's and linkages on every critical surface. If we do (giant scale 3D is probably the most prevalent use of multi-servo surfaces), they are rarely truly independent and are mainly for torque requirements and stability on long/ flexible surfaces, rather than for flight critical redundancy.
Setting up dual servos that don't fight each other is complicated and just having 2 servos on a surface with perfect servo matching doesn't protect from a jammed servo - see recent CARF Hawk thread for a way to decouple the servos to offer some protection.
Flying our models, especially unproven scratch-built projects is a balance of risk. Having been bitten I know how I'm revising my next build, and that is to avoid poly-fuses. Once the design is proven with actual current draw data across the full envelope I may change my mind.
Paul
if 2 controls fight each other , a fuseless connection is not the solution but a mnechanical one is...
for the hawk there are buetifull mechanical solutions to overcome mismatch.
anyway if you want to stay fuseless its your choice...
i made a nice video on youtube testing a CB210 fuseless ..
i tried all cables out there and found out that the cables are fuses now , until i used a AWG20 that finally burned the pin that guides your connectors.
so i guess they did manage to fuse it afterall ;-)
02-18-2021 | 07:35 AM
#1941
A couple of thoughts:
- Watching Jvaliensy connection diagram: had the REX3-900 been connected directly to the CB-200 instead of going via the Cortex Pro, most likely the system would have switched to 900 and the crash avoided. The REX 7 had no power after the overload; so, the situation would have been recognized by the transmitter.
Considering that both signals from the Cortex Pro to the CB-200 are internally bridged at the CP, both R1 and R2 ports were overloaded and burned. (don't know if the internal bridge has been changed, but since the receiver switching occurs at the CP, it makes sense that it is still that way).
My preference has always been to connect one receiver to the CP, and the other one directly to the Central Box. He might have belly landed and lost gyro and telemetry, but avoided the crash.
- Unless Jeti designers had a strong reason to limit the current output at R1 and R2 to 200mA, it is with no doubt the weakest link from a system reliability point of view, with catastrophic results. In fact, whichever reason they might have had is been overruled by power patching the Cortex Pro or the receivers anyway.
The only reason why there aren't more crashes because of this issue is because the overload and failure occurs mostly while at your shop
I power patch all my receivers, btw.
Jack
- Watching Jvaliensy connection diagram: had the REX3-900 been connected directly to the CB-200 instead of going via the Cortex Pro, most likely the system would have switched to 900 and the crash avoided. The REX 7 had no power after the overload; so, the situation would have been recognized by the transmitter.
Considering that both signals from the Cortex Pro to the CB-200 are internally bridged at the CP, both R1 and R2 ports were overloaded and burned. (don't know if the internal bridge has been changed, but since the receiver switching occurs at the CP, it makes sense that it is still that way).
My preference has always been to connect one receiver to the CP, and the other one directly to the Central Box. He might have belly landed and lost gyro and telemetry, but avoided the crash.
- Unless Jeti designers had a strong reason to limit the current output at R1 and R2 to 200mA, it is with no doubt the weakest link from a system reliability point of view, with catastrophic results. In fact, whichever reason they might have had is been overruled by power patching the Cortex Pro or the receivers anyway.
The only reason why there aren't more crashes because of this issue is because the overload and failure occurs mostly while at your shop
I power patch all my receivers, btw.
Jack
The following users liked this post:
RickP (03-26-2021)
03-26-2021 | 11:15 AM
#1943
Joined: Aug 2007
Posts: 189
Likes: 0
Received 0 Likes
on
0 Posts
From: Littleton,
CO
Ohhhh myyyy godnesssssss look what just showed up, fresh from the oven New Jeti DS-16 G2 Black Carbon
Happy weekend, I hope everybody will do tons of flying.
Zb/Jeti USA
Attachment 2270048
Attachment 2270049
Happy weekend, I hope everybody will do tons of flying.
Zb/Jeti USA
Attachment 2270048
Attachment 2270049
03-26-2021 | 03:04 PM
#1945

My Feedback: (46)
Ohhhh myyyy godnesssssss look what just showed up, fresh from the oven New Jeti DS-16 G2 Black Carbon
Happy weekend, I hope everybody will do tons of flying.
Zb/Jeti USA
Attachment 2270048
Attachment 2270049
Happy weekend, I hope everybody will do tons of flying.
Zb/Jeti USA
Attachment 2270048
Attachment 2270049
Also when will these be listed on the website?
Any other colors expected to arrive anytime soon?
Last edited by camss69; 03-26-2021 at 03:08 PM.
03-29-2021 | 08:59 AM
#1946
We already have Gold/Black/Red Carbon and Black/Silver. No more colors are planned.
https://www.espritmodel.com/jeti-duplex-radio-systems-ds-16-2-4ghz-900mhz-line.aspx
Zb/Jeti USA
Last edited by ZB; 03-29-2021 at 09:17 AM.
03-29-2021 | 09:42 AM
#1947
My Feedback: (46)
Black Jeti DS-16 G2 are in production, 2-3 weeks
We already have Gold/Black/Red Carbon and Black/Silver. No more colors are planned.
https://www.espritmodel.com/jeti-duplex-radio-systems-ds-16-2-4ghz-900mhz-line.aspx
Attachment 2270055
Zb/Jeti USA
We already have Gold/Black/Red Carbon and Black/Silver. No more colors are planned.
https://www.espritmodel.com/jeti-duplex-radio-systems-ds-16-2-4ghz-900mhz-line.aspx
Attachment 2270055
Zb/Jeti USA
03-30-2021 | 08:32 AM
#1948
Folks:
Could use some help..
I believe there's a short cut button to tab through Voice on Event Screen without using the rotary dial? If yes, could you please share the process on how this is accomplished, I would greatly appreciate your assistance.
Thanks,
Craig
Could use some help..
I believe there's a short cut button to tab through Voice on Event Screen without using the rotary dial? If yes, could you please share the process on how this is accomplished, I would greatly appreciate your assistance.
Thanks,
Craig
04-27-2021 | 07:17 AM
#1949
We Got You, Introducing 3D Printed Jeti Receiver Holders!!!
https://www.espritmodel.com/search.aspx?find=holder+3d

https://www.espritmodel.com/search.aspx?find=holder+3d

